

Hướng dẫn lựa chọn động cơ servo: Cách chọn động cơ phù hợp để điều khiển chuyển động chính xác
Chọn động cơ servo phù hợp cho ứng dụng của bạn có thể tạo ra sự khác biệt giữa một hệ thống mang lại hiệu suất chính xác, đáng tin cậy và một hệ thống phải vật lộn với lỗi định vị, quá nhiệt hoặc hỏng hóc sớm. Cho dù bạn đang thiết kế cánh tay robot, máy CNC, dây chuyền đóng gói tự động hay thiết bị y tế, việc hiểu các thông số động cơ servo và tiêu chí lựa chọn là điều cần thiết đối với các kỹ sư cũng như nhóm mua sắm.
Hướng dẫn này hướng dẫn bạn các nguyên tắc cơ bản về kỹ thuật, các thông số lựa chọn chính, đánh đổi hiệu suất và cân nhắc thiết kế mà bạn cần để chỉ định và tìm nguồn động cơ servo tối ưu cho ứng dụng điều khiển chuyển động của mình.
Mục lục
- [Động cơ Servo là gì và nó hoạt động như thế nào?](# 1-động cơ servo là gì và nó hoạt động như thế nào)
- [Các thông số kỹ thuật chính để lựa chọn động cơ servo] (# 2-key-technical-parameters-for-servo-motor-selection)
- [Cách tính mô-men xoắn và quán tính yêu cầu] (# 3-cách tính toán mô-men xoắn và quán tính yêu cầu)
- [Động cơ Servo so với Động cơ bước: Khi nào nên sử dụng cái nào] (# 4-động cơ servo-vs-động cơ bước-khi nào sử dụng-cái nào)
- [Cân nhắc thiết kế và cạm bẫy phổ biến] (# 5-cân nhắc thiết kế và cạm bẫy phổ biến)
- [Cân nhắc về chuỗi cung ứng và tìm nguồn cung ứng] (# 6-Cân nhắc về chuỗi cung ứng và tìm nguồn cung ứng)
- [Câu hỏi thường gặp] (# 7-Câu hỏi thường gặp)
- [Kết luận] (# 8-kết luận)
1. Động cơ Servo là gì và nó hoạt động như thế nào?
Động cơ servo là một bộ truyền động quay hoặc tuyến tính cung cấp khả năng kiểm soát chính xác vị trí góc hoặc tuyến tính, vận tốc và gia tốc. Không giống như động cơ tiêu chuẩn chỉ quay khi được cấp nguồn, động cơ servo kết hợp một thiết bị phản hồi — thường là bộ mã hóa hoặc bộ phân giải — liên tục báo cáo vị trí trục thực tế trở lại bộ điều khiển.
Kiến trúc điều khiển vòng kín này cho phép hệ thống servo phát hiện và sửa lỗi định vị trong thời gian thực. Khi bộ điều khiển gửi lệnh vị trí, ổ đĩa sẽ so sánh vị trí được lệnh với phản hồi của bộ mã hóa. Bất kỳ độ lệch nào cũng tạo ra tín hiệu lỗi mà biến tần sử dụng để điều chỉnh dòng điện động cơ, đưa trục đến vị trí mục tiêu chính xác.
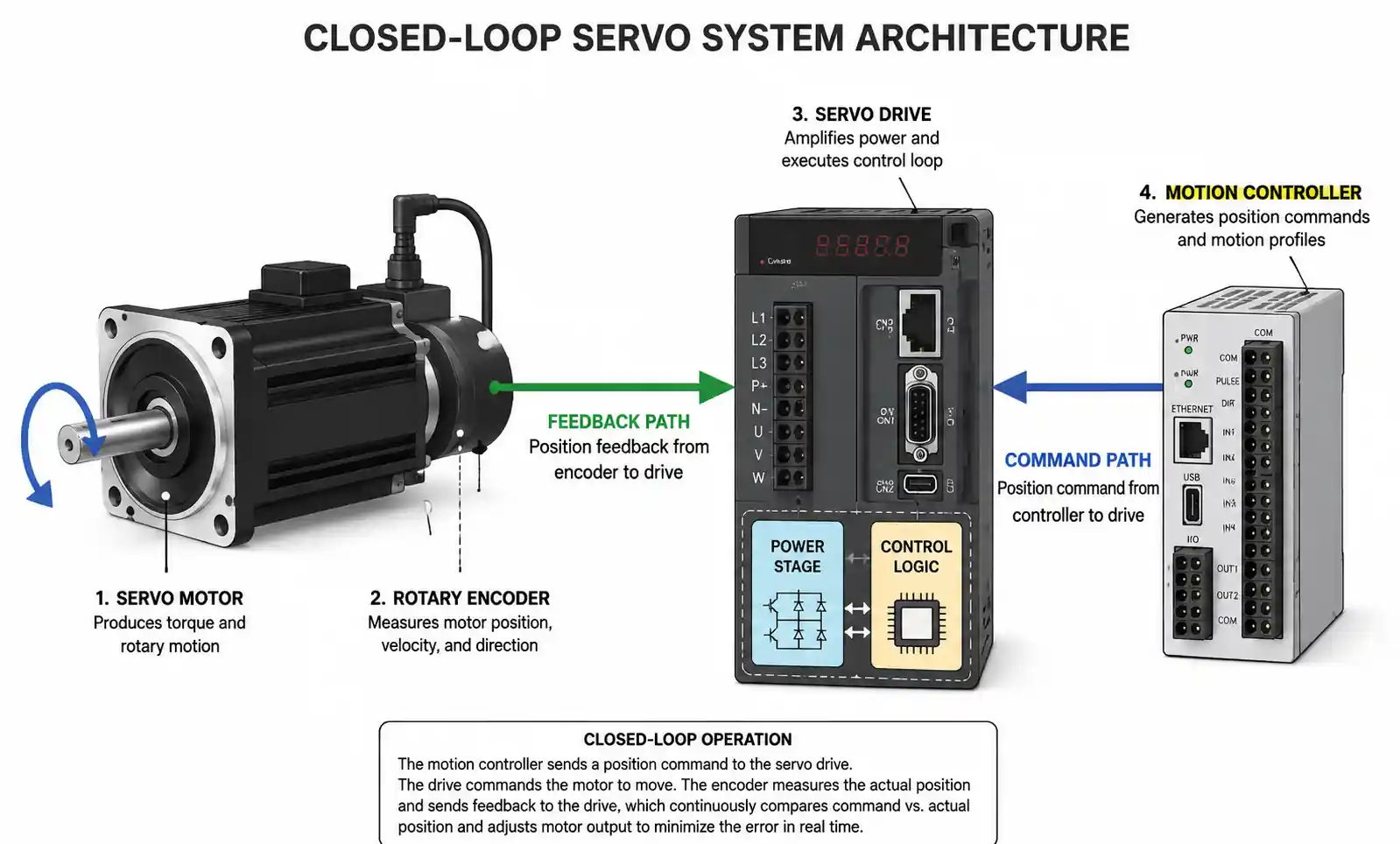
Các thành phần cốt lõi của hệ thống servo bao gồm chính động cơ, bộ mã hóa hoặc bộ phân giải phản hồi vị trí, ổ đĩa servo diễn giải các lệnh và điều chỉnh dòng điện và bộ điều khiển chuyển động tạo ra cấu hình quỹ đạo. Trong các ứng dụng công nghiệp, động cơ servo được đánh giá cao về khả năng thực hiện các cấu hình chuyển động phức tạp với gia tốc cao, thời gian lắng nhanh và độ chính xác định vị có thể lặp lại xuống đến giây cung.
Động cơ servo có sẵn trong cả biến thể AC và DC. Động cơ servo AC thống trị tự động hóa công nghiệp do mật độ công suất cao hơn, hiệu suất nhiệt tốt hơn và thiết kế không chổi than giúp loại bỏ việc bảo trì. Động cơ servo DC vẫn phổ biến trong các ứng dụng công suất thấp hơn và các hệ thống cũ, mặc dù động cơ servo DC không chổi than (BLDC) đã thay thế phần lớn các thiết kế chổi than trong thiết bị mới.
2. Các thông số kỹ thuật chính để lựa chọn động cơ servo
Việc chọn động cơ servo phù hợp đòi hỏi phải hiểu từng thông số kỹ thuật ảnh hưởng như thế nào đến hiệu suất, độ tin cậy và chi phí của ứng dụng của bạn. Các thông số sau đây tạo thành nền tảng của bất kỳ quyết định lựa chọn động cơ servo nào.
Thông số kỹ thuật mô-men xoắn
Mô-men xoắn định mức (mô-men xoắn liên tục) xác định mô-men xoắn cực đại mà động cơ có thể cung cấp liên tục mà không bị quá nóng. Đây là mô-men xoắn có sẵn để hoạt động bền vững và phải vượt quá yêu cầu mô-men xoắn trung bình của ứng dụng của bạn với biên độ thích hợp. Mô-men xoắn cực đại (mô-men xoắn cực đại) đại diện cho mô-men xoắn thời gian ngắn có sẵn để tăng tốc, giảm tốc hoặc vượt qua các đột biến tải tức thời, thường gấp 2 đến 3 lần mô-men xoắn định mức.
Khi định cỡ mô-men xoắn, hãy tính đến tổn thất ma sát, tải trọng (đối với trục thẳng đứng), mô-men xoắn gia tốc và hệ số an toàn từ 1,2 đến 1,5. Mô-men xoắn nhỏ dẫn đến bỏ lỡ các bước, lỗi định vị và lỗi truyền động; Quá khổ lãng phí vốn và không gian bảng điều khiển.
Phạm vi tốc độ
Tốc độ định mức cho biết tốc độ liên tục tối đa của động cơ ở mô-men xoắn định mức. Ngoài tốc độ này, mô-men xoắn khả dụng giảm do các hạn chế EMF ngược trong động cơ servo AC. Tốc độ tối đa xác định giới hạn tốc độ tuyệt đối, mặc dù mô-men xoắn có thể giảm đáng kể tại thời điểm này.
Đối với các ứng dụng yêu cầu mô-men xoắn không đổi trong phạm vi tốc độ rộng, hãy xem xét động cơ có khả năng suy yếu trường hoặc giảm hộp số. Các ứng dụng tốc độ cao đòi hỏi sự chú ý cẩn thận đến cân bằng cơ học, lựa chọn ổ trục và độ phân giải bộ mã hóa.
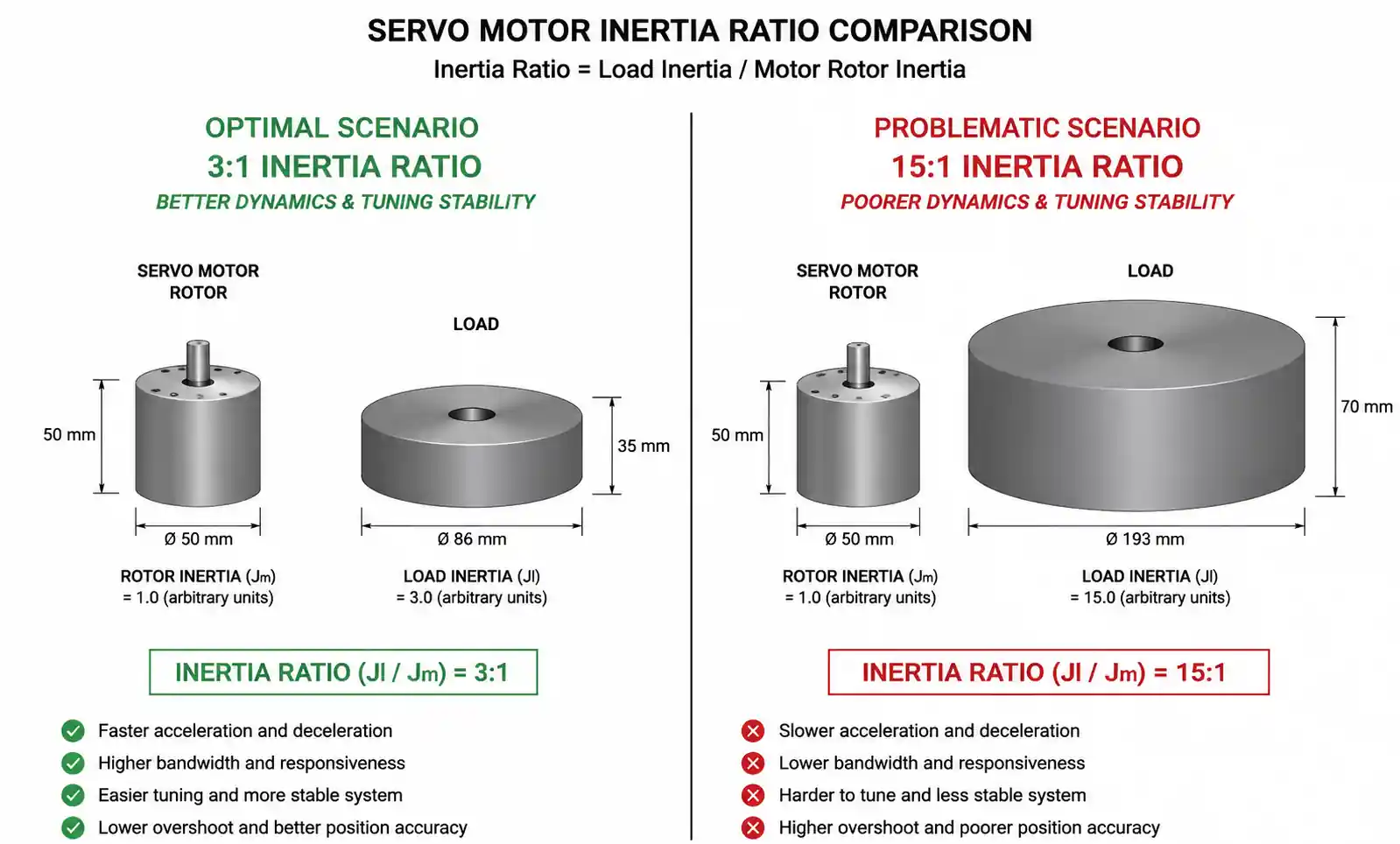
Tỷ lệ quán tính và quán tính
Quán tính động cơ (quán tính rôto) đo điện trở của rôto đối với gia tốc góc. Quán tính tải thể hiện quán tính phản xạ của tất cả các bộ phận chuyển động gắn vào trục động cơ. Tỷ lệ quán tính (quán tính tải chia cho quán tính động cơ) ảnh hưởng nghiêm trọng đến động lực học của hệ thống và độ ổn định của điều chỉnh.
Thực hành thiết kế truyền thống nhắm mục tiêu tỷ lệ quán tính từ 1:1 đến 10:1 để điều chỉnh và phản hồi tối ưu. Tỷ lệ trên 10: 1 có thể dẫn đến phản hồi chậm chạp, vượt quá tốc độ và khó đạt được điều chỉnh ổn định. Các ổ đĩa servo hiện đại với các thuật toán điều chỉnh tiên tiến có thể xử lý các tỷ lệ cao hơn, nhưng tỷ lệ thấp hơn thường mang lại hiệu suất tốt hơn.
Độ phân giải bộ mã hóa
Độ phân giải bộ mã hóa xác định độ chính xác định vị và độ chính xác phản hồi. Các loại bộ mã hóa phổ biến bao gồm bộ mã hóa gia tăng (đo vị trí tương đối thông qua xung cầu phương), bộ mã hóa tuyệt đối (báo cáo vị trí tuyệt đối ngay cả sau khi mất điện) và bộ phân giải (thiết bị tương tự có khả năng chống nhiễu cao). Độ phân giải được chỉ định bằng số lần trên mỗi vòng quay (CPR) hoặc bit cho bộ mã hóa tuyệt đối.
Độ phân giải cao hơn cải thiện độ chính xác định vị và cho phép chuyển động mượt mà hơn ở tốc độ thấp, nhưng làm tăng chi phí hệ thống và yêu cầu xử lý dữ liệu. Đối với các ứng dụng định vị chính xác, bộ mã hóa tuyệt đối 17 bit đến 23 bit là phổ biến; Đối với các tác vụ ít đòi hỏi hơn, bộ mã hóa 13 bit đến 16 bit là đủ.
Thông số kỹ thuật điện
Điện áp và dòng điện định mức xác định điểm vận hành điện của động cơ và xác định khả năng tương thích của ổ đĩa. Điện áp công nghiệp phổ biến bao gồm 230VAC một pha và 400VAC ba pha cho động cơ servo AC. Hằng số động cơ (Kt) liên quan đến dòng điện với mô-men xoắn, trong khi hằng số điện áp (Ke) liên quan đến tốc độ với EMF ngược.
Các đặc tính nhiệt bao gồm điện trở nhiệt và hằng số thời gian nhiệt, xác định tốc độ động cơ nóng lên khi tải và làm mát trong thời gian không tải. Quản lý nhiệt thích hợp là điều cần thiết cho các ứng dụng làm việc liên tục.
| Tham số | Phạm vi điển hình | Tiêu chí lựa chọn |
|---|---|---|
| Mô-men xoắn định mức | 0.05 Nm - 100 Nm + | Phải vượt quá mô-men xoắn tải trung bình 20-50% |
| Mô-men xoắn cực đại | Mô-men xoắn định mức 2x - 3x | Phải xử lý các đỉnh tăng và giảm tốc |
| Tốc độ định mức | 1000 - 6000 vòng / phút | Nên vượt quá tốc độ thi công tối đa 10-20% |
| Tỷ lệ quán tính | 1:1 – 10:1 (tối ưu) | Tỷ lệ thấp hơn cải thiện khả năng điều chỉnh và phản hồi |
| Độ phân giải bộ mã hóa | 13 bit – 23 bit | Độ phân giải cao hơn để định vị chính xác |
| Điện áp | 230 VAC / 400 VAC | Phải phù hợp với nguồn điện có sẵn |
Sau khi xem lại bảng này, hãy xác minh rằng động cơ bạn đã chọn cung cấp đủ biên độ mô-men xoắn ở tốc độ tối đa cần thiết. Nhiều ứng dụng không thành công vì các kỹ sư định kích thước mô-men xoắn cực đại mà không kiểm tra xem mô-men xoắn đó có sẵn ở tốc độ vận hành hay không.
3. Cách tính mô-men xoắn và quán tính yêu cầu
Tính toán mô-men xoắn và quán tính chính xác ngăn chặn việc thiếu kích thước (dẫn đến lỗi định vị và lỗi truyền động) và quá khổ (lãng phí vốn và phức tạp trong việc điều chỉnh). Phương pháp sau đây áp dụng cho phần lớn các ứng dụng servo quay.
Tính toán mô-men xoắn
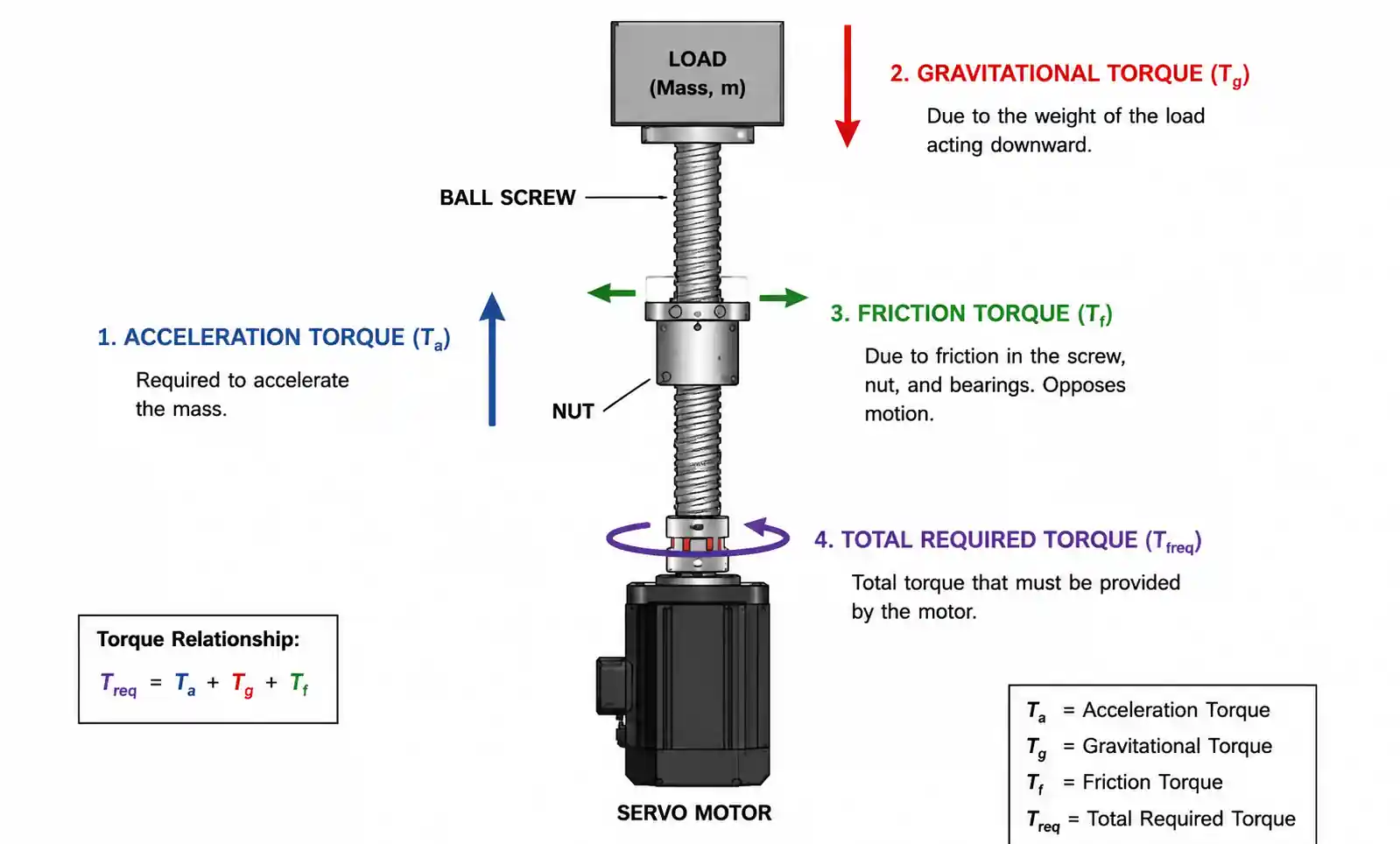
Tổng mô-men xoắn yêu cầu bao gồm bốn thành phần: mô-men xoắn gia tốc, mô-men xoắn ma sát, mô-men xoắn hấp dẫn (đối với trục thẳng đứng hoặc nghiêng) và mô-men xoắn quá trình (lực cắt, lực cản vật liệu, v.v.).
Mô-men xoắn gia tốc được tính như sau: T_accel = J_total × α, trong đó J_total là tổng quán tính hệ thống (động cơ cộng tải) và α là gia tốc góc tính bằng rad / s². Đối với trục tuyến tính có vít bi hoặc bộ truyền động dây đai, phản xạ khối lượng tuyến tính và gia tốc đến trục động cơ bằng cách sử dụng lợi thế cơ học.
Mô-men xoắn ma sát bao gồm ma sát ổ trục, lực kéo phớt và ma sát trượt. Đối với vít bi, mô-men xoắn ma sát thường bằng 5-10% mô-men xoắn hấp dẫn và quá trình. Đối với bộ truyền động dây đai, tổn thất ma sát dao động từ 15-30% tùy thuộc vào độ căng của dây đai và chất lượng ổ trục ròng rọc.
Mô-men xoắn hấp dẫn đối với trục thẳng đứng là: T_grav = m × g × r, trong đó m là khối lượng tải, g là gia tốc hấp dẫn (9,81 m / s²) và r là bán kính hiệu dụng (ví dụ: dây dẫn vít chia cho 2π đối với vít bi).
Mô-men xoắn quá trình phụ thuộc vào ứng dụng — lực cắt trong máy CNC, lực căng vật liệu trong xử lý web hoặc lực kẹp trong robot. Tham khảo dữ liệu kỹ thuật dành riêng cho ứng dụng cho các giá trị này.
Thêm cả bốn thành phần và áp dụng hệ số an toàn từ 1,2 đến 1,5 để tính đến độ không chắc chắn của mô hình, dung sai sản xuất và lão hóa.
Tính toán quán tính
Tính quán tính phản xạ của từng thành phần chuyển động bằng công thức chuẩn: đối với khối lượng hình trụ quay, J = 0,5 × m × r²; đối với khối lượng tuyến tính di chuyển qua vít, J = m × (chì / 2π)²; đối với khối lượng tuyến tính dẫn động bằng dây đai, J = m × r² trong đó r là bán kính ròng rọc.
Tổng tất cả quán tính tải phản xạ và so sánh với quán tính rôto của động cơ để xác định tỷ lệ quán tính. Nếu tỷ lệ vượt quá 10: 1, hãy cân nhắc sử dụng hộp số để giảm quán tính tải phản xạ hoặc chọn động cơ lớn hơn với quán tính rôto cao hơn.
4. Động cơ Servo so với Động cơ bước: Khi nào sử dụng cái nào
Động cơ servo và động cơ bước đều cung cấp khả năng điều khiển vị trí chính xác, nhưng chúng hoạt động trên các nguyên tắc khác nhau về cơ bản và phù hợp với các yêu cầu ứng dụng khác nhau. Hiểu được sự đánh đổi giúp các kỹ sư đưa ra lựa chọn hiệu quả về chi phí.
Kiến trúc điều khiển
Động cơ bước hoạt động vòng hở: bộ điều khiển gửi xung bước và động cơ quay một góc cố định trên mỗi xung mà không có phản hồi. Sự đơn giản này làm giảm chi phí và độ phức tạp của hệ thống, nhưng không cung cấp xác minh rằng động cơ thực sự đạt đến vị trí được chỉ huy. Nếu động cơ bị dừng hoặc bỏ qua các bước do tải quá mức, bộ điều khiển không có cách nào để phát hiện lỗi.
Động cơ servo hoạt động vòng kín: bộ mã hóa liên tục báo cáo vị trí thực tế và biến tần điều chỉnh bất kỳ sai lệch nào giữa vị trí được chỉ huy và vị trí thực tế. Phản hồi này cho phép hiệu suất cao hơn nhưng yêu cầu các ổ đĩa và điều chỉnh phức tạp hơn.
So sánh hiệu suất
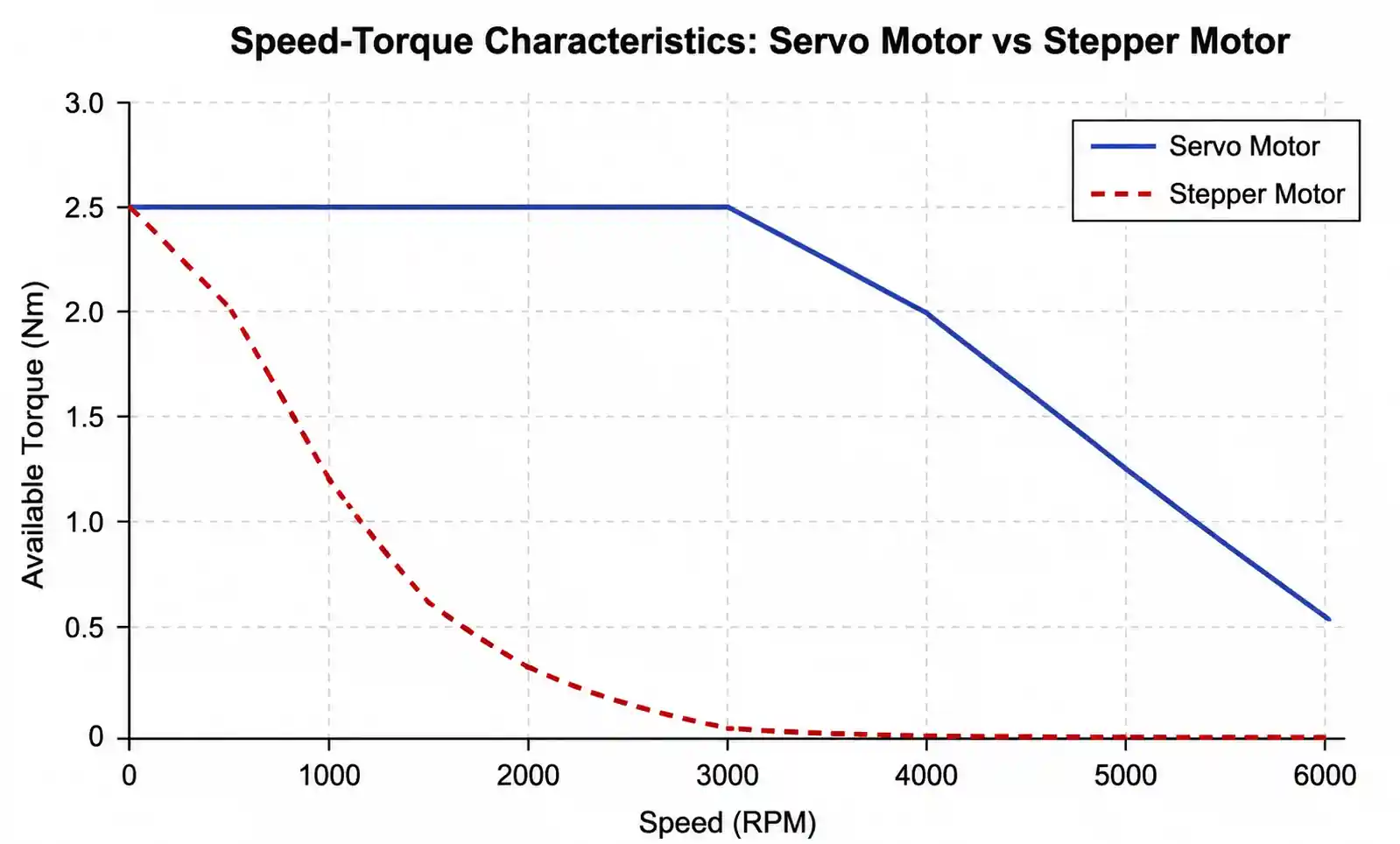
Động cơ servo mang lại tốc độ và gia tốc cao hơn đáng kể so với động cơ bước. Trong khi các bước thường hoạt động dưới 2000 vòng / phút và mất mô-men xoắn nhanh chóng ở tốc độ cao hơn, động cơ servo duy trì mô-men xoắn cao trên toàn bộ dải tốc độ của chúng và có thể đạt 6000 vòng / phút trở lên. Điều này làm cho servo trở thành lựa chọn rõ ràng cho các ứng dụng thông lượng cao và máy chu kỳ nhanh.
Tỷ lệ mô-men xoắn trên quán tính có lợi cho động cơ servo, dẫn đến khả năng tăng tốc nhanh hơn và thời gian chu kỳ ngắn hơn. Động cơ servo cũng cung cấp hoạt động trơn tru, yên tĩnh trên toàn bộ dải tốc độ, trong khi các bước có thể thể hiện sự cộng hưởng và rung động ở một số tốc độ nhất định trừ khi được điều chỉnh bằng vi bước hoặc bộ giảm chấn.
Hiệu quả năng lượng là một lợi thế servo khác. Các bước rút dòng điện đầy đủ liên tục để duy trì mô-men xoắn giữ, ngay cả khi đứng yên. Động cơ servo chỉ hút dòng điện khi cần thiết để duy trì vị trí hoặc di chuyển tải, giảm tiêu thụ điện năng và sinh nhiệt trong tủ điều khiển.
Chi phí và độ phức tạp
Động cơ bước có giá thấp hơn đáng kể so với động cơ servo có kích thước tương đương và ổ đĩa bước đơn giản hơn và rẻ hơn so với ổ đĩa servo. Đối với các ứng dụng hiệu suất thấp với tải trọng có thể dự đoán được và yêu cầu tốc độ khiêm tốn, bước mang lại lợi thế chi phí hấp dẫn.
Hệ thống servo yêu cầu điều chỉnh mức tăng PID và giới hạn vận tốc/gia tốc để đạt được hiệu suất ổn định, nhạy bén. Hệ thống bước không yêu cầu điều chỉnh nhưng có thể cần microstepping và cộng hưởng damping để hoạt động trơn tru.
| Tiêu chí | Động cơ bước | Động cơ Servo |
|---|---|---|
| Phương pháp điều khiển | Vòng lặp hở (không có phản hồi) | Vòng kín (phản hồi bộ mã hóa) |
| Phạm vi tốc độ | Lên đến 2000 vòng / phút điển hình | Lên đến 6000+ vòng / phút |
| Mô-men xoắn ở tốc độ cao | Giảm đáng kể trên 1000 vòng / phút | Duy trì mô-men xoắn đến tốc độ định mức |
| Độ chính xác định vị | ±Góc bước 5% (không sửa lỗi) | Giây cung với phản hồi |
| Tăng tốc | Trung bình (giới hạn bởi quán tính) | Cao (tỷ lệ mô-men xoắn trên quán tính tốt hơn) |
| Hiệu quả năng lượng | Thấp hơn (dòng điện liên tục) | Cao hơn (hiện tại theo yêu cầu) |
| Chi phí ban đầu | Thấp hơn | Cao hơn |
| Yêu cầu điều chỉnh | Không | Có (tăng PID) |
| Các ứng dụng tiêu biểu | Máy in 3D, định vị cơ bản, tự động hóa tốc độ thấp | Máy CNC, robot, đóng gói tốc độ cao, lắp ráp chính xác |
Yếu tố quyết định chính là yêu cầu hiệu suất ứng dụng. Nếu ứng dụng của bạn yêu cầu tốc độ cao, tăng tốc nhanh, xử lý tải động hoặc độ chính xác định vị đã được xác minh, động cơ servo biện minh cho chi phí cao hơn của chúng. Nếu tải trọng có thể dự đoán được, tốc độ khiêm tốn và chi phí là rất quan trọng, các bước cung cấp hiệu suất phù hợp với mức đầu tư thấp hơn.
5. Cân nhắc thiết kế và những cạm bẫy phổ biến
Tích hợp động cơ servo thích hợp đòi hỏi sự chú ý đến các chi tiết thiết kế điện, cơ và nhiệt. Những cân nhắc sau đây giúp tránh những lỗi thiết kế phổ biến nhất dẫn đến hiệu suất kém hoặc hỏng hóc sớm.
Tích hợp cơ học
Lựa chọn khớp nối trục thích hợp là rất quan trọng. Khớp nối cứng truyền mô-men xoắn tối đa và độ chính xác định vị nhưng yêu cầu căn chỉnh chính xác để tránh làm hỏng ổ trục. Khớp nối linh hoạt chịu được sự sai lệch nhỏ nhưng gây ra phản ứng dữ dội và tuân thủ làm giảm hiệu suất định vị. Đối với các ứng dụng chính xác, hãy sử dụng ống thổi hoặc khớp nối đĩa có phản ứng dữ dội tối thiểu và độ cứng xoắn cao.
Độ cứng lắp đặt ảnh hưởng đến độ cộng hưởng của hệ thống và độ chính xác của định vị. Gắn động cơ servo vào các cấu trúc cứng bằng cách sử dụng các chốt mô-men xoắn thích hợp. Tránh tải trọng đúc hẫng tạo tải trọng bên lên ổ trục động cơ, rút ngắn tuổi thọ ổ trục.
Khi sử dụng hộp số, hãy chọn bộ giảm tốc truyền động hành tinh hoặc sóng hài chất lượng cao với phản ứng dữ dội tối thiểu. Phản ứng dữ dội trong hệ thống truyền động trực tiếp dẫn đến lỗi định vị. Đối với các ứng dụng servo, chỉ định hộp số có phản ứng dữ dội dưới 5 phút cung.
Hệ thống dây điện và nối đất
Định tuyến cáp thích hợp ngăn chặn nhiễu điện từ (EMI) có thể làm hỏng tín hiệu bộ mã hóa và gây ra lỗi hoặc lỗi định vị. Chạy cáp nguồn động cơ và cáp tín hiệu bộ mã hóa trong các ống dẫn riêng biệt. Sử dụng cáp xoắn đôi có vỏ bọc cho tín hiệu bộ mã hóa và chỉ kết nối tấm chắn với mặt đất truyền động ở một đầu để tránh vòng nối đất.
Đảm bảo có đủ thước đo dây cho cáp nguồn động cơ để giảm thiểu voltage thả, đặc biệt là đối với các đường cáp dài. Giảm điện áp quá mức làm giảm mô-men xoắn khả dụng và có thể gây ra lỗi điện áp thấp của ổ đĩa. Tham khảo thông số kỹ thuật của nhà sản xuất ổ đĩa để biết chiều dài cáp tối đa và thước đo dây tối thiểu.
Lắp đặt ổ đĩa servo trong vỏ bọc được kiểm soát khí hậu với hệ thống thông gió đầy đủ hoặc làm mát cưỡng bức. Hầu hết các ổ đĩa servo được thiết kế cho nhiệt độ môi trường lên đến 40-45 ° C. Hoạt động trên phạm vi này sẽ kích hoạt tắt bộ giảm nhiệt hoặc tắt bảo vệ.
Quản lý nhiệt
Động cơ servo tạo ra nhiệt trong quá trình hoạt động và nhiệt độ quá cao làm giảm tuổi thọ cách điện của cuộn dây và tuổi thọ mỡ ổ trục. Hầu hết các động cơ servo công nghiệp đều có lớp cách điện F (155 ° C) hoặc loại H (180 ° C), nhưng phải hoạt động dưới các giới hạn này để có tuổi thọ lâu dài.
Chu kỳ nhiệm vụ ảnh hưởng đến tải nhiệt. Một động cơ có thể cung cấp 10 Nm liên tục có thể xử lý mô-men xoắn cực đại 20 Nm trong thời gian ngắn. Tính toán mô-men xoắn RMS cho chu kỳ làm việc của bạn và xác minh rằng nó vẫn thấp hơn định mức liên tục của động cơ. Nhiều ổ đĩa servo bao gồm các mô hình nhiệt theo dõi nhiệt độ động cơ và ngăn quá nhiệt.
Đối với các ứng dụng có nhiệt độ môi trường cao hoặc chu kỳ làm việc cao liên tục, hãy xem xét động cơ có làm mát cưỡng bức (quạt bên ngoài) hoặc làm mát bằng chất lỏng.
Những lỗi thiết kế phổ biến
Bỏ qua tỷ lệ quán tính trong quá trình lựa chọn động cơ dẫn đến khó điều chỉnh và phản ứng chậm chạp. Luôn tính toán quán tính tải và xác minh tỷ lệ quán tính nằm trong phạm vi chấp nhận được, lý tưởng nhất là dưới 5: 1 cho các ứng dụng đòi hỏi khắt khe.
Không tính đến quán tính phản xạ qua bánh răng hoặc ốc vít có thể dẫn đến động cơ có kích thước nhỏ hơn. Khối lượng tuyến tính 10 kg trên vít bi 5 mm / vòng quay phản xạ đến khoảng 0,00006 kg·m² tại trục động cơ, có vẻ nhỏ nhưng cộng lại nhanh chóng với nhiều trục hoặc khối lượng lớn hơn.
Chỉ định mô-men xoắn cực đại mà không kiểm tra đường cong tốc độ-mô-men xoắn là một lỗi thường gặp khác. Động cơ có thể cung cấp mô-men xoắn cực đại 20 Nm, nhưng chỉ ở tốc độ thấp. Ở 3000 vòng / phút, mô-men xoắn khả dụng có thể giảm xuống 8 Nm. Luôn xác minh rằng mô-men xoắn cần thiết có sẵn ở tốc độ vận hành tối đa.
Bỏ qua giới hạn chiều dài cáp có thể làm hỏng phản hồi của bộ mã hóa hoặc gây ra sự cố sụt áp. Tuân theo thông số kỹ thuật của nhà sản xuất ổ đĩa để biết chiều dài cáp động cơ tối đa, thường là 25-50 mét đối với ổ đĩa tiêu chuẩn.
6. Cân nhắc về chuỗi cung ứng và tìm nguồn cung ứng
Ngoài các thông số kỹ thuật, các yếu tố tìm nguồn cung ứng thực tế ảnh hưởng đến tiến độ, chi phí và khả năng hỗ trợ lâu dài của dự án. Các kỹ sư và nhóm mua sắm nên đánh giá các yếu tố này sớm trong quá trình lựa chọn.
Thời gian giao hàng và tính khả dụng
Động cơ servo tiêu chuẩn của các nhà sản xuất lớn (Siemens, Yaskawa, Mitsubishi, Kollmorgen, Fanuc) thường có thời gian thực hiện từ 4-12 tuần tùy thuộc vào kích thước và cấu hình. Động cơ tùy chỉnh với cuộn dây đặc biệt, cấu hình lắp đặt hoặc loại bộ mã hóa có thể kéo dài thời gian giao hàng lên 16-20 tuần.
Trong thời gian gián đoạn chuỗi cung ứng hoặc giai đoạn nhu cầu cao, thời gian giao hàng có thể kéo dài đáng kể. Đối với các dự án quan trọng, hãy xem xét tìm nguồn cung ứng kép từ nhiều nhà sản xuất hoặc duy trì hàng tồn kho chiến lược của các thành phần dài hạn.
Nhiều nhà phân phối (Digi-Key, Mouser, Allied Electronics) cung cấp các mẫu động cơ servo phổ biến để giao hàng ngay lập tức, mặc dù sự lựa chọn bị hạn chế so với việc đặt hàng trực tiếp từ các nhà sản xuất. Để tạo mẫu và phát triển, kho nhà phân phối đẩy nhanh tiến độ.
Chứng nhận và Tuân thủ
Động cơ servo công nghiệp thường mang dấu CE cho thị trường châu Âu và công nhận UL cho thị trường Bắc Mỹ. Đối với các ứng dụng chuyên biệt, hãy xác minh các chứng nhận bổ sung:
- AEC-Q200 hoặc tương đương cho các ứng dụng ô tô yêu cầu phạm vi nhiệt độ mở rộng và khả năng chống rung
- IEC 60601 cho các ứng dụng thiết bị y tế
- ATEX hoặc IECEx cho môi trường khí quyển dễ cháy nổ
- Xếp hạng IP (IP54, IP65, IP67) để lắp đặt rửa hoặc ngoài trời
Thiếu chứng nhận có thể trì hoãn việc ra mắt sản phẩm hoặc ngăn cản việc thâm nhập thị trường. Xác minh sớm các yêu cầu chứng nhận và chọn động cơ có phê duyệt thích hợp.
Tổng chi phí sở hữu
Chi phí động cơ ban đầu chỉ đại diện cho một phần của phương trình tổng chi phí. Hãy xem xét:
- Chi phí ổ đĩa: động cơ hiệu suất cao có thể yêu cầu ổ đĩa đắt tiền hơn với các tính năng nâng cao
- Chi phí năng lượng: động cơ hiệu quả hơn giúp giảm chi phí vận hành trong suốt vòng đời của thiết bị
- Chi phí bảo trì: động cơ servo không chổi than yêu cầu bảo trì tối thiểu so với động cơ DC có chổi than
- Phụ tùng sẵn có: động cơ từ các nhà sản xuất lớn có hỗ trợ phụ tùng lâu dài tốt hơn
Đối với việc lắp ráp thiết bị khối lượng lớn, hãy thương lượng giá số lượng lớn và xem xét tiêu chuẩn hóa trên một dòng động cơ duy nhất để giảm độ phức tạp của hàng tồn kho và cải thiện sự quen thuộc của kỹ thuật viên.
| Yếu tố tìm nguồn cung ứng | Tùy chọn chi phí thấp | Tùy chọn hiệu suất cao |
|---|---|---|
| Thời gian dẫn | 4-8 tuần (kiểu máy tiêu chuẩn) | 12-20 tuần (thông số kỹ thuật tùy chỉnh) |
| Tính khả dụng | Cổ phiếu nhà phân phối có sẵn | Sản xuất theo đơn đặt hàng |
| Chứng nhận | CE, UL cơ bản | AEC-Q, ATEX, IECEx, y tế |
| Xếp hạng IP | IP54 (tiêu chuẩn công nghiệp) | IP65, IP67 (rửa sạch, ngoài trời) |
| Phạm vi giá (ví dụ 1 Nm) | $ 200-400 | $ 600-1200 + |
| Hiệu quả năng lượng | 80-85% điển hình | 90-94% (thiết kế hiệu quả cao) |
| Loại bộ mã hóa | Gia tăng (chi phí thấp hơn) | Nhiều lượt tuyệt đối (cao cấp) |
Đối với các sản phẩm thương mại, cân bằng chi phí ban đầu với các yêu cầu về hiệu suất và tổng chi phí sở hữu. Đối với các ứng dụng quan trọng, hãy ưu tiên độ tin cậy, hỗ trợ và tính khả dụng lâu dài hơn giá mua thấp nhất.
7. Câu hỏi thường gặp
Sự khác biệt giữa động cơ servo AC và động cơ servo DC là gì?
Động cơ servo AC sử dụng nguồn AC ba pha và thường sử dụng thiết kế đồng bộ nam châm vĩnh cửu (PMSM) hoặc DC không chổi than (BLDC). Chúng cung cấp mật độ năng lượng cao hơn, hiệu suất nhiệt tốt hơn và hoạt động không cần bảo trì do không có bàn chải. Động cơ servo DC sử dụng thiết kế DC có chổi than hoặc không chổi than và điều khiển đơn giản hơn nhưng yêu cầu thay thế chổi than định kỳ trong các biến thể chổi than. Đối với các kiểu dáng công nghiệp mới, động cơ servo AC là sự lựa chọn tiêu chuẩn.
Làm cách nào để tính mô-men xoắn động cơ servo cần thiết cho ứng dụng vít bi?
Tính tổng mô-men xoắn là tổng mô-men xoắn gia tốc, mô-men xoắn ma sát và mô-men xoắn hấp dẫn (đối với trục đứng). Mô-men xoắn gia tốc là T = J_total × α. Mô-men xoắn ma sát cho vít bi xấp xỉ 5-10% tải trọng trọng trường. Mô-men xoắn hấp dẫn cho chuyển động thẳng đứng là T = m × g × (chì / 2π). Phản xạ tất cả các lực và khối lượng tuyến tính đến trục động cơ bằng cách sử dụng dây dẫn vít, sau đó thêm hệ số an toàn 20-50%.
Tôi nên nhắm mục tiêu tỷ lệ quán tính nào khi chọn động cơ servo?
Thực tiễn thiết kế truyền thống khuyến nghị tỷ lệ quán tính từ 1:1 đến 10:1, với tỷ lệ thấp hơn mang lại phản hồi động tốt hơn và điều chỉnh dễ dàng hơn. Các ổ đĩa servo hiện đại với khả năng điều chỉnh thích ứng có thể xử lý tỷ lệ lên đến 30:1 hoặc cao hơn, nhưng việc điều chỉnh trở nên khó khăn hơn và phản hồi của hệ thống giảm sút. Đối với các ứng dụng đòi hỏi khả năng tăng tốc nhanh và định vị chính xác, tỷ lệ mục tiêu dưới 5:1.
Tôi có thể sử dụng động cơ servo trong môi trường chân không hoặc phòng sạch không?
Động cơ servo tiêu chuẩn sử dụng vòng bi bôi trơn bằng mỡ thoát khí trong chân không và có thể chứa các hạt không thích hợp cho phòng sạch. Đối với các ứng dụng chân không, hãy chỉ định động cơ có vòng bi bôi trơn khô hoặc vòng bi từ. Đối với phòng sạch, hãy chọn động cơ có vỏ kín (IP65 trở lên) và vật liệu tương thích với phòng sạch. Một số nhà sản xuất cung cấp động cơ chuyên dụng được thiết kế đặc biệt cho những môi trường này.
Động cơ servo thường tồn tại trong bao lâu?
Tuổi thọ của động cơ servo chủ yếu bị giới hạn bởi tuổi thọ ổ trục và sự xuống cấp cách điện của cuộn dây. Trong điều kiện hoạt động bình thường (tải thích hợp, nhiệt độ môi trường thích hợp, môi trường sạch sẽ), tuổi thọ của ổ trục động cơ servo thường là 20.000 đến 30.000 giờ hoạt động. Tuổi thọ cách nhiệt cuộn dây phụ thuộc vào nhiệt độ hoạt động; Động cơ chạy ở nhiệt độ định mức có thể kéo dài 40,000+ giờ. Hoạt động dưới nhiệt độ định mức sẽ kéo dài đáng kể tuổi thọ cách điện theo phương trình Arrhenius.
Ý nghĩa của hằng số động cơ (Kt) và hằng số điện áp (Ke) là gì?
Hằng số mô-men xoắn (Kt) xác định mối quan hệ giữa dòng điện động cơ và mô-men xoắn đầu ra: T = Kt × I. Động cơ Kt cao hơn tạo ra nhiều mô-men xoắn hơn trên mỗi ampe, cải thiện hiệu quả nhưng thường phải trả giá bằng tốc độ tối đa thấp hơn. Hằng số điện áp (Ke) xác định EMF ngược được tạo ra trên một đơn vị tốc độ: V = Ke × ω. Các hằng số này có liên quan đến Kt = Ke trong các đơn vị nhất quán và đại diện cho các đặc điểm thiết kế động cơ cơ bản ảnh hưởng đến hiệu suất trong phạm vi hoạt động.
Tôi nên chọn bộ mã hóa gia tăng hay tuyệt đối?
Bộ mã hóa gia tăng đo sự thay đổi vị trí tương đối và yêu cầu di chuyển sau mỗi chu kỳ nguồn để thiết lập tham chiếu vị trí. Chúng có chi phí thấp hơn và đủ cho các ứng dụng có thể chấp nhận được việc dẫn đường. Bộ mã hóa tuyệt đối báo cáo vị trí trực tiếp sau khi bật nguồn mà không cần di chuyển, loại bỏ sự cần thiết của công tắc hành trình và quy trình dẫn đường. Chúng có giá cao hơn nhưng giảm thời gian khởi động và ngăn ngừa sự cố. Đối với các ứng dụng nhiều lượt, hãy chọn bộ mã hóa tuyệt đối nhiều vòng theo dõi vị trí trên nhiều vòng quay trục.
Làm cách nào để khắc phục sự cố động cơ servo quá nóng?
Trước tiên, hãy xác minh rằng mô-men xoắn RMS được tính toán vẫn thấp hơn định mức liên tục của động cơ. Kiểm tra sự ràng buộc cơ học, ma sát quá mức hoặc sai lệch buộc động cơ phải làm việc nhiều hơn dự kiến. Xác minh hệ thống thông gió đầy đủ xung quanh động cơ và đảm bảo nhiệt độ môi trường vẫn nằm trong thông số kỹ thuật. Kiểm tra các thông số điều chỉnh ổ đĩa — độ lợi tích hợp quá mức có thể gây ra dòng điện liên tục ngay cả khi động cơ đứng yên. Đo dòng điện động cơ thực tế trong quá trình hoạt động để xác minh rằng nó phù hợp với mong đợi.
8. Kết luận
Chọn một động cơ servo không phải là khoa học tên lửa — nhưng bạn cần phải kết hợp mô-men xoắn, tốc độ, quán tính và độ phân giải phản hồi với những gì máy của bạn thực sự làm. Nếu bạn cần tốc độ cao, tăng tốc nhanh và định vị chính xác khi thay đổi tải, servo đáng để trả thêm chi phí. Đối với các công việc đơn giản hơn, chậm hơn, tải ổn định, một bước có thể thực hiện công việc với ít tiền hơn.
Trước khi mua, hãy chạy các số: mô-men xoắn trong toàn bộ chu kỳ, mô-men xoắn ở tốc độ tối đa, tỷ lệ quán tính và độ phân giải bộ mã hóa. Đừng quên những cái bẫy phổ biến — bỏ qua đường cong tốc độ-mô-men xoắn, quên quán tính phản xạ hoặc đánh giá thấp giới hạn chiều dài cáp. Đối với các dự án quan trọng, hãy nhờ kỹ sư ứng dụng của nhà cung cấp động cơ tham gia sớm. Họ sẽ kiểm tra toán học của bạn, đề xuất kích thước khung hình phù hợp và gắn cờ tích hợp trước khi chúng cắn bạn. Lấy bảng dữ liệu và ghi chú ứng dụng và nếu có thể, hãy kiểm tra bằng bộ công cụ đánh giá trước khi cam kết về số lượng.
Sẵn sàng chọn một động cơ? Sử dụng các bước tính toán mà chúng tôi đã đề cập, so sánh một vài thương hiệu và yêu cầu nhà cung cấp của bạn xem xét lựa chọn của bạn. Nó giúp tiết kiệm những cơn đau đầu trên đường.