
Hướng dẫn lựa chọn cảm biến MEMS: Cân nhắc thực tế cho kỹ sư thiết kế
Khi bạn đang nghiên cứu sâu vào một thiết kế sản phẩm mới và cần thêm khả năng cảm biến chuyển động, giám sát môi trường hoặc đo lường chính xác, cảm biến MEMS thường trở thành giải pháp phù hợp. Nhưng với hàng trăm thiết bị MEMS trên thị trường — mỗi thiết bị đều tuyên bố hiệu suất vượt trội — làm thế nào để bạn thực sự chọn thiết bị phù hợp cho ứng dụng của mình?
Hướng dẫn này hướng dẫn các cân nhắc thực tế quan trọng khi chọn cảm biến MEMS cho các thiết kế trong thế giới thực. Chúng tôi sẽ đề cập đến các thông số chính ảnh hưởng đến hiệu suất hệ thống, thảo luận về sự đánh đổi mà bạn sẽ gặp phải trong quá trình lựa chọn thành phần và nêu bật các lỗi tích hợp phổ biến có thể làm chệch hướng lịch trình thiết kế của bạn.
Mục lục
- [Công nghệ MEMS mang lại những gì cho điện tử hiện đại] (# 1-what-mems-technology-brings-to-modern-electronics)
- [Các loại cảm biến MEMS chính và nguyên lý hoạt động] (# 2-key-mems-sensor-types-and-operating-principles)
- [Các thông số lựa chọn quan trọng mà bạn không thể bỏ qua] (# 3-critical-selection-parameters-you-cant-ignore)
- [Tiêu chí lựa chọn ứng dụng cụ thể] (# 4-tiêu chí lựa chọn ứng dụng cụ thể)
- [Cân nhắc về bố cục và tích hợp PCB] (# 5-pcb-layout-and-integration-considerations)
- [Những cạm bẫy thiết kế phổ biến và cách tránh chúng] (# 6-cạm bẫy thiết kế phổ biến và cách tránh chúng)
- [Câu hỏi thường gặp] (# 7-Câu hỏi thường gặp)
- [Kết luận] (# 8-kết luận)
1. Công nghệ MEMS mang lại những gì cho thiết bị điện tử hiện đại
MEMS — Hệ thống cơ điện vi mô — tích hợp các phần tử cơ học, cảm biến, thiết bị truyền động và thiết bị điện tử trên một chất nền silicon duy nhất. Công nghệ này đã trưởng thành đáng kể trong hai thập kỷ qua và cảm biến MEMS hiện xử lý các tác vụ trước đây yêu cầu các thành phần rời rạc cồng kềnh, ngốn năng lượng.
Ưu điểm chính của MEMS là sự kết hợp giữa yếu tố hình thức nhỏ, tiêu thụ điện năng thấp và khả năng mở rộng sản xuất hàng loạt. Gia tốc kế MEMS trong gói LGA 3x3mm có thể mang lại hiệu suất yêu cầu cảm biến lớn hơn mười lần chỉ mười lăm năm trước. Việc giảm kích thước này không chỉ quan trọng đối với thiết bị đeo được của người tiêu dùng mà còn quan trọng không kém trong các bộ điều khiển công nghiệp hạn chế về không gian và hệ thống an toàn ô tô.
Tuy nhiên, các thiết bị MEMS không phải là không có sự đánh đổi. Các cấu trúc cơ học bên trong các cảm biến này dễ bị ảnh hưởng bởi ứng suất môi trường, hiệu ứng nhiệt và trôi dạt lâu dài. Hiểu trước những hạn chế này sẽ giúp bạn không phải thiết kế lại tốn kém sau này.
2. Các loại cảm biến MEMS chính và nguyên lý hoạt động
Các loại cảm biến MEMS khác nhau sử dụng các nguyên tắc vật lý riêng biệt để đo các thông số mục tiêu của chúng. Biết cách hoạt động của cảm biến giúp bạn hiểu điểm mạnh và điểm yếu của nó.
Gia tốc kế đo gia tốc tuyến tính bằng cách sử dụng khối lượng bằng chứng được treo bởi chùm tia linh hoạt. Khi gia tốc xảy ra, khối lượng bằng chứng dịch chuyển và các phần tử cảm biến điện dung, áp điện hoặc áp điện phát hiện chuyển động này. Cảm biến điện dung thống trị gia tốc kế MEMS tiêu dùng và công nghiệp do tiêu thụ điện năng thấp và hiệu suất tiếng ồn tốt.
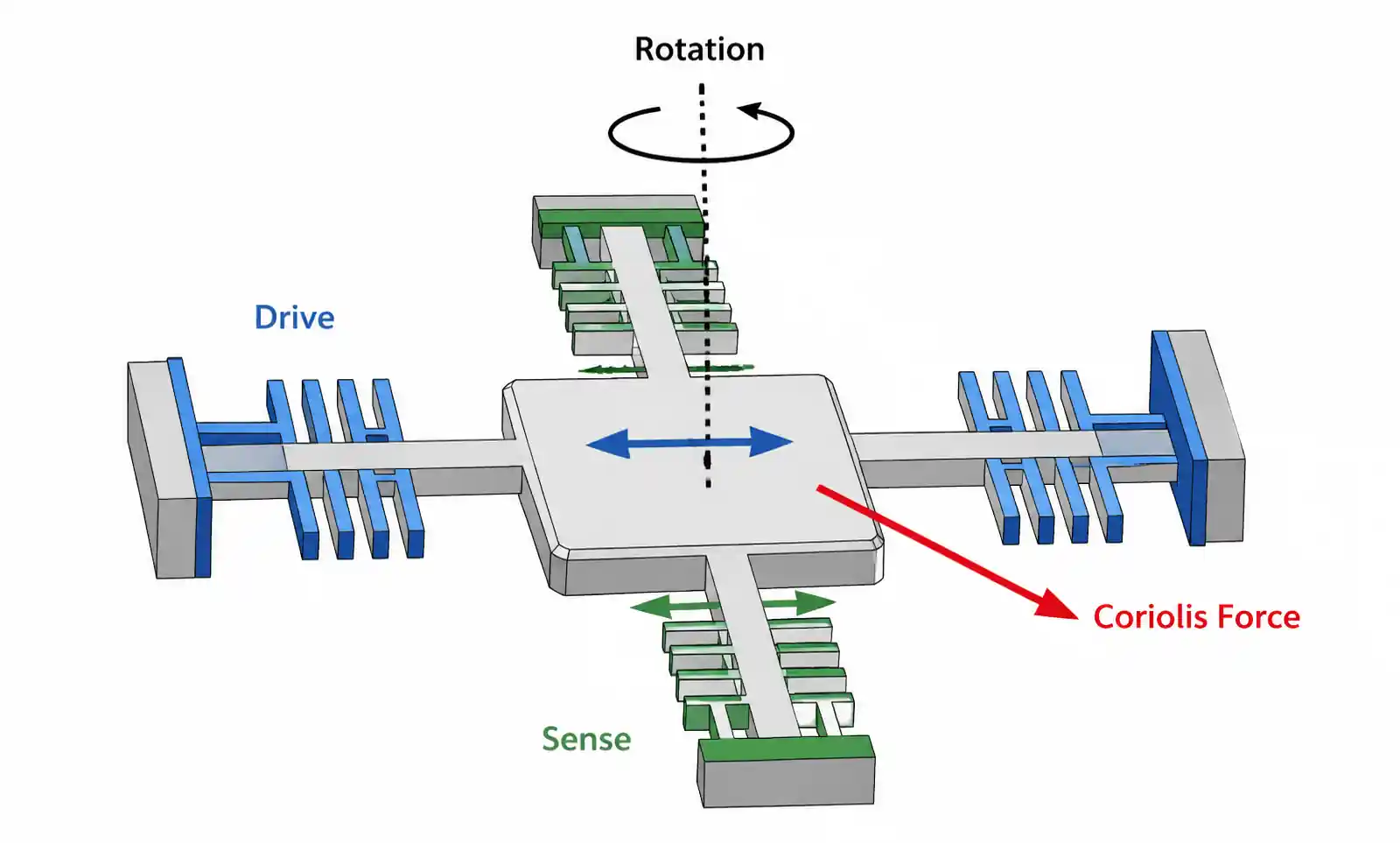
Con quay hồi chuyển đo vận tốc góc thông qua hiệu ứng Coriolis. Một khối lượng chống rung chịu lực Coriolis khi cảm biến quay, gây ra sự dịch chuyển vuông góc với cả hướng rung và trục quay. Sự dịch chuyển này được đo bằng điện dung. Con quay hồi chuyển MEMS phức tạp hơn gia tốc kế và thường tiêu thụ nhiều điện năng hơn.
Cảm biến áp suất sử dụng màng ngăn linh hoạt làm chệch hướng dưới áp lực tác dụng. Các phần tử áp điện trên màng ngăn thay đổi điện trở với ứng suất cơ học, cho phép đo áp suất. Cảm biến áp suất MEMS bao gồm từ thiết bị áp suất tuyệt đối để đo khí quyển đến cảm biến chênh lệch áp suất để theo dõi lưu lượng.
Micrô chuyển đổi áp suất âm thanh thành tín hiệu điện bằng cách sử dụng màng mềm và tấm nền cố định, tạo thành tụ điện. Sóng âm gây lệch màng, thay đổi điện dung. Micrô MEMS đã thay thế phần lớn micrô tụ điện trong điện thoại thông minh và thiết bị IoT do độ tin cậy vượt trội và khả năng tương thích lắp ráp tự động.
Cảm biến môi trường đo nhiệt độ, độ ẩm và nồng độ khí. Cảm biến nhiệt độ MEMS thường sử dụng điốt nhiệt hoặc điện trở. Cảm biến độ ẩm dựa vào cảm biến điện dung hoặc điện trở bằng vật liệu điện môi nhạy cảm với độ ẩm. Cảm biến khí sử dụng màng oxit kim loại được nung nóng có điện trở thay đổi khi tiếp xúc với khí.
3. Các thông số lựa chọn quan trọng mà bạn không thể bỏ qua
Khi đánh giá cảm biến MEMS, một số thông số ảnh hưởng trực tiếp đến việc thiết kế của bạn có đáp ứng các yêu cầu về hiệu suất hay không.
Phạm vi đo và độ phân giải
Phạm vi đo phải bao gồm các điều kiện hoạt động của ứng dụng của bạn với lề. Gia tốc kế để phát hiện va chạm xe cần phạm vi ±50g trở lên, trong khi thiết bị theo dõi thể dục có thể đeo được hoạt động tốt với ±2g hoặc ±4g. Phạm vi cao hơn thường đi kèm với độ phân giải giảm—bạn không thể có được cả phạm vi tối đa và độ phân giải tốt nhất trong một thiết bị.
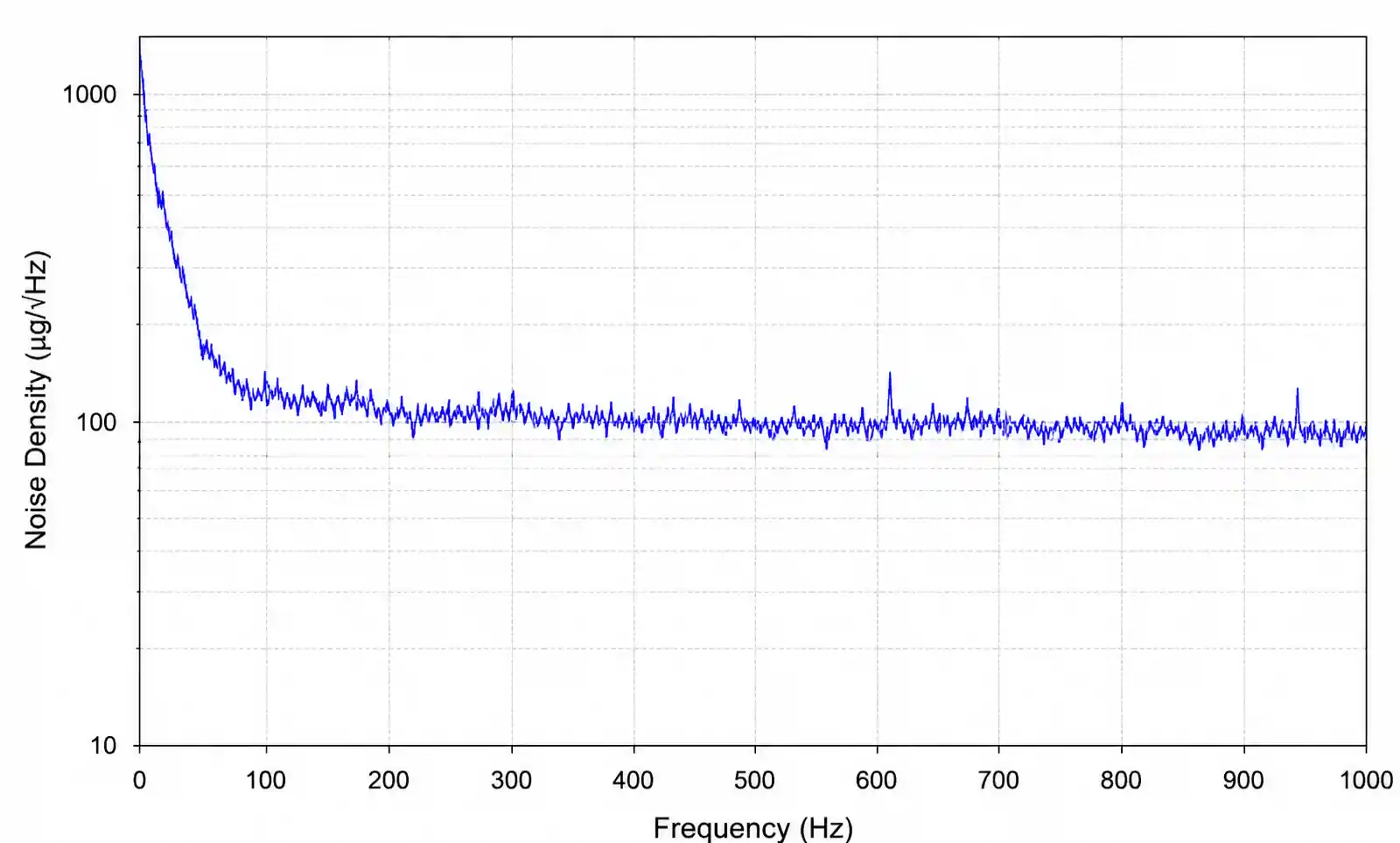
Độ phân giải xác định sự thay đổi nhỏ nhất có thể phát hiện được trong thông số được đo. Để theo dõi hướng chính xác, bạn cần một gia tốc kế có độ phân giải dưới mg. Để phát hiện chuyển động đơn giản, độ phân giải 10mg là đủ. Kiểm tra kỹ thông số kỹ thuật độ phân giải của bảng dữ liệu — một số nhà cung cấp báo giá nhiễu RMS tính bằng μg / √Hz, yêu cầu tích hợp trên băng thông tín hiệu của bạn để xác định độ phân giải thực tế.
Hiệu suất tiếng ồn
Tiếng ồn hạn chế khả năng phát hiện các tín hiệu nhỏ của hệ thống. Cảm biến MEMS thể hiện một số nguồn nhiễu: nhiễu cơ học nhiệt từ khối lượng bằng chứng, nhiễu điện tử từ mạch đọc và nhiễu lượng tử hóa từ ADC.
Gia tốc kế và con quay hồi chuyển chỉ định mật độ tiếng ồn tính bằng μg / √Hz hoặc ° / s / √Hz. Để tính tổng nhiễu trong ứng dụng của bạn, hãy nhân mật độ nhiễu với căn bậc hai của băng thông tín hiệu của bạn. Con quay hồi chuyển có mật độ nhiễu 0,01°/s/√Hz được sử dụng với băng thông 100Hz tạo ra nhiễu RMS khoảng 0,1°/s.
Thiết kế tiếng ồn thấp đòi hỏi sự chú ý cẩn thận đến việc lọc nguồn điện và bố trí PCB. Chúng tôi sẽ đề cập đến những cân nhắc về bố cục trong phần 5.
Công suất tiêu thụ
Cảm biến MEMS là thiết bị công suất thấp, nhưng "công suất thấp" có nghĩa là những thứ khác nhau giữa các ứng dụng. Gia tốc kế MEMS có thể tiêu thụ 10μA ở chế độ máy đếm bước chân luôn bật, phù hợp với các thiết bị đeo chạy bằng pin. Cùng một thiết bị ở chế độ hiệu suất cao có thể tiêu thụ 200μA, vẫn có thể chấp nhận được đối với các thiết bị hỗ trợ USB nhưng có vấn đề đối với các ứng dụng di động đồng xu.
Nhiều cảm biến MEMS cung cấp nhiều chế độ nguồn. Hiểu các yêu cầu về chu kỳ làm việc và hiệu suất giúp bạn chọn thiết bị và chế độ hoạt động cân bằng giữa công suất và hiệu suất. Đừng bỏ qua dòng điện dự phòng — ngay cả một vài microamp dòng điện dự phòng cũng quan trọng trong các thiết kế công suất cực thấp.
Tốc độ dữ liệu đầu ra và băng thông
Tốc độ dữ liệu đầu ra (ODR) xác định tần suất cảm biến cung cấp các kết quả đọc cập nhật. ODR yêu cầu của bạn phụ thuộc vào tần số tín hiệu bạn cần nắm bắt. Theo định lý Nyquist, bạn cần ít nhất 2 lần tần số tín hiệu cao nhất, nhưng trong thực tế, lấy mẫu quá mức 5-10 lần mang lại kết quả tốt hơn.
Để theo dõi độ rung, bạn có thể cần ODR từ 1kHz trở lên. Để cảm biến độ nghiêng, 10-50Hz là đủ. ODR cao hơn thường làm tăng mức tiêu thụ điện năng, vì vậy hãy chọn tốc độ tối thiểu đáp ứng yêu cầu của bạn.
Băng thông tương tự của cảm biến cũng rất quan trọng. Một số cảm biến lọc kỹ thuật số đầu ra, có thể tạo ra độ trễ pha. Kiểm tra xem độ trễ nhóm của cảm biến có chấp nhận được đối với ứng dụng của bạn hay không, đặc biệt là trong các vòng điều khiển hoặc các phép đo quan trọng về thời gian.
Ổn định nhiệt độ và hiệu chuẩn
Cảm biến MEMS thể hiện sự thay đổi độ lệch và độ nhạy phụ thuộc vào nhiệt độ. Gia tốc kế có thể thấy độ lệch lệch 1-2mg / ° C và độ nhạy 0,01-0,02% / ° C. Đối với các ứng dụng chính xác, bạn cần hiệu chuẩn tại nhà máy hoặc hiệu chuẩn trong hệ thống để bù đắp cho các tác động của nhiệt độ.
Kiểm tra xem cảm biến có cung cấp cảm biến nhiệt độ tích hợp để bù trôi hay không. Một số thiết bị bao gồm hệ số bù nhiệt độ được lập trình tại nhà máy được lưu trữ trong bộ nhớ cố định. Đối với các ứng dụng quan trọng, hãy lập kế hoạch thực hiện hiệu chuẩn nhiệt độ đa điểm của riêng bạn trong quá trình sản xuất.
Giao diện và tích hợp
Cảm biến MEMS thường sử dụng giao diện đầu ra I2C, SPI hoặc tương tự. I2C đơn giản hóa bus nhiều thiết bị nhưng giới hạn thông lượng ở 400kHz (chế độ nhanh) hoặc 1MHz (chế độ nhanh cộng). SPI hỗ trợ tốc độ dữ liệu cao hơn—quan trọng đối với các ứng dụng có ODR cao hoặc khi đọc nhiều cảm biến đồng thời.
Chức năng ngắt rất quan trọng đối với các thiết kế hạn chế về năng lượng. Tìm kiếm các cảm biến có tính năng phát hiện chuyển động có thể lập trình, vượt ngưỡng hoặc ngắt hình mờ FIFO. Các tính năng này cho phép MCU của bạn ở chế độ ngủ cho đến khi cảm biến phát hiện một sự kiện đáng để xử lý.
4. Tiêu chí lựa chọn ứng dụng cụ thể
Các ứng dụng khác nhau ưu tiên các thông số khác nhau. Dưới đây là cách thu hẹp lựa chọn của bạn dựa trên thị trường mục tiêu của bạn.
Ứng dụng ô tô
Cảm biến MEMS ô tô phải đáp ứng các tiêu chuẩn trình độ AEC-Q100 và hoạt động đáng tin cậy trong -40°C đến +125°C (hoặc +150°C đối với các ứng dụng dưới mui xe). Gia tốc kế phát hiện va chạm cần thời gian phản hồi cực nhanh và xếp hạng khả năng chống sốc cao — thường là khả năng chịu sốc cơ học ±2000g hoặc cao hơn.
Hệ thống kiểm soát ổn định điện tử (ESC) và phát hiện lật yêu cầu cảm biến gia tốc kế và con quay hồi chuyển phù hợp với dung sai hiệu chuẩn chặt chẽ. Nhiều thiết kế ô tô sử dụng đơn vị đo quán tính 6 trục (IMU) kết hợp gia tốc kế 3 trục và con quay hồi chuyển 3 trục trong một gói duy nhất.
Đối với hệ thống giám sát áp suất lốp (TPMS), bạn cần cảm biến áp suất MEMS xử lý môi trường khắc nghiệt bên trong lốp: lực ly tâm cao, dao động nhiệt độ rộng và độ tin cậy lâu dài. Tìm kiếm các thiết bị có di sản ô tô đã được chứng minh và các thông số kỹ thuật môi trường mạnh mẽ.
| Tham số | Phát hiện va chạm | ESC/Tái đầu tư | TPMS |
|---|---|---|---|
| Loại cảm biến | Gia tốc kế | IMU 6 trục | Áp suất |
| Phạm vi | ±50g đến ±400g | ±2g gia tốc, con quay hồi chuyển ±300 ° / s | 100-450 kPa tuyệt đối |
| Thời gian đáp ứng | <0,5ms | <10ms | <10ms |
Các ứng dụng ô tô yêu cầu xác nhận rộng rãi và kiểm tra độ tin cậy. Yếu tố các mốc thời gian đủ điều kiện 12-18 tháng khi lựa chọn linh kiện cho thiết kế ô tô.
Ứng dụng công nghiệp và IoT
Cảm biến công nghiệp cần sự ổn định và hoạt động lâu dài trong môi trường đầy thách thức: rung, chu kỳ nhiệt độ, độ ẩm và đôi khi tiếp xúc với hóa chất. Hệ thống giám sát tình trạng sử dụng gia tốc kế MEMS để phát hiện mài mòn ổ trục, mất cân bằng động cơ và suy giảm sức khỏe máy.
Để phân tích độ rung, bạn cần gia tốc kế có băng thông rộng (thường là DC đến vài kHz) và tiếng ồn thấp. Gia tốc kế MEMS áp điện hoạt động tốt để theo dõi độ rung vì chúng xử lý nội dung tần số cao tốt hơn các thiết bị điện dung. Tuy nhiên, chúng không đo gia tốc DC, vì vậy chúng không thích hợp để cảm biến độ nghiêng.

Các nút cảm biến IoT ưu tiên mức tiêu thụ điện năng cực thấp và kết nối không dây. Màn hình môi trường chạy bằng pin có thể sử dụng cảm biến áp suất MEMS để theo dõi độ cao, cảm biến kết hợp nhiệt độ / độ ẩm và micrô MEMS để phát hiện sự kiện âm thanh. Tổng dòng điện của hệ thống ở chế độ ngủ có thể chỉ là một vài microamps.
Các ứng dụng công nghiệp thường yêu cầu đầu ra vòng lặp dòng điện 4-20mA hoặc giao diện cách ly cho môi trường điện khắc nghiệt. Nhiều cảm biến MEMS không cung cấp đầu ra dòng điện tương tự nguyên bản, vì vậy bạn sẽ cần các mạch điều hòa tín hiệu.
Điện tử tiêu dùng
Các thiết bị tiêu dùng đã thúc đẩy việc mở rộng quy mô sản xuất MEMS trong thập kỷ qua. Điện thoại thông minh thường chứa 6-10 cảm biến MEMS: gia tốc kế, con quay hồi chuyển, từ kế, cảm biến áp suất khí quyển, nhiều micrô và đôi khi là cảm biến tiệm cận.
Đối với thiết bị đeo và thiết bị theo dõi thể dục, kích thước và mức tiêu thụ điện năng là điều tối quan trọng. Tìm gia tốc kế trong các gói dưới 2mm với dòng điện hoạt động 10-20μA. Nhiều gia tốc kế MEMS hiện đại bao gồm máy đếm bước phần cứng đếm bước mà không cần sự can thiệp của MCU, làm giảm đáng kể công suất hệ thống.
Tai nghe nhét tai không dây thực sự đã thúc đẩy sự phát triển micrô MEMS về phía trước. Những micrô này phải phù hợp với không gian cực kỳ nhỏ trong khi vẫn duy trì tỷ lệ tín hiệu trên nhiễu tốt và xử lý mức áp suất âm thanh cao. Thiết kế micrô kép với các thuật toán tạo chùm cung cấp khả năng khử tiếng ồn ngay cả trong môi trường ồn ào.
| Ứng dụng | Cảm biến chính | Các thông số quan trọng | Gói tiêu biểu | Ngân sách năng lượng |
|---|---|---|---|---|
| Điện thoại thông minh | IMU 6 trục, áp suất, micrô | Tiếng ồn thấp, kích thước nhỏ, mạnh mẽ | LGA 2.5x3mm | 50-200μA liên tục |
| Theo dõi thể dục | Gia tốc kế 3 trục | Công suất cực thấp, máy đếm bước chân | LGA 2x2mm | Trung bình 10-30μA |
| Tai nghe TWS | Micrô MEMS | SNR >64dB, kích thước nhỏ | 3,5x2,6mm | N/A (luôn bật) |
| Đồng hồ thông minh | IMU 6 trục, áp suất, micrô | Công suất thấp, phát hiện cử chỉ | LGA 2.5x3mm | Trung bình 20-100μA |
Các sản phẩm tiêu dùng phải đối mặt với áp lực chi phí lớn. Các thiết kế khối lượng lớn được hưởng lợi từ các chiến lược tìm nguồn kép, nhưng hãy lưu ý rằng các cảm biến của các nhà cung cấp khác nhau hiếm khi có các đặc tính hiệu suất giống hệt nhau. Nếu bạn định chuyển đổi nhà cung cấp, hãy dành thời gian để hiệu chuẩn lại và điều chỉnh chương trình cơ sở.
Thiết bị y tế và chăm sóc sức khỏe
Các ứng dụng y tế yêu cầu độ tin cậy đã được chứng minh, thường yêu cầu hệ thống quản lý chất lượng ISO 13485 từ các nhà cung cấp. Các thiết bị y tế có thể đeo được — máy theo dõi đường huyết liên tục, máy theo dõi tim, thiết bị theo dõi hô hấp — sử dụng cảm biến MEMS để theo dõi bệnh nhân.
Để theo dõi hô hấp, cảm biến áp suất MEMS đo chênh lệch áp suất trên các phần tử hạn chế lưu lượng để tính toán thể tích hơi thở. Các cảm biến này cần độ tuyến tính và độ lặp lại tuyệt vời trên dải áp suất liên quan (thường là ±2 kPa).
Các phép đo trở kháng sinh học để phân tích thành phần cơ thể đôi khi sử dụng gia tốc kế MEMS để phát hiện vị trí cơ thể, điều này ảnh hưởng đến độ chính xác của phép đo. Những gia tốc kế này cần bù ổn định theo nhiệt độ vì ngay cả sai số nghiêng nhỏ cũng chuyển thành hiện vật đo lường.

Các mốc thời gian của thiết bị y tế dài do các yêu cầu quy định. Chọn các cảm biến MEMS đã được thiết lập với tuổi thọ đã được chứng minh — bạn không muốn cảm biến đã chọn của mình lỗi thời giữa chừng chứng nhận.
5. Cân nhắc về bố cục và tích hợp PCB
Ngay cả cảm biến MEMS tốt nhất cũng sẽ hoạt động kém hiệu quả với bố cục PCB kém. Đây là những gì thực sự quan trọng dựa trên kinh nghiệm thực địa.
Gắn cơ khí
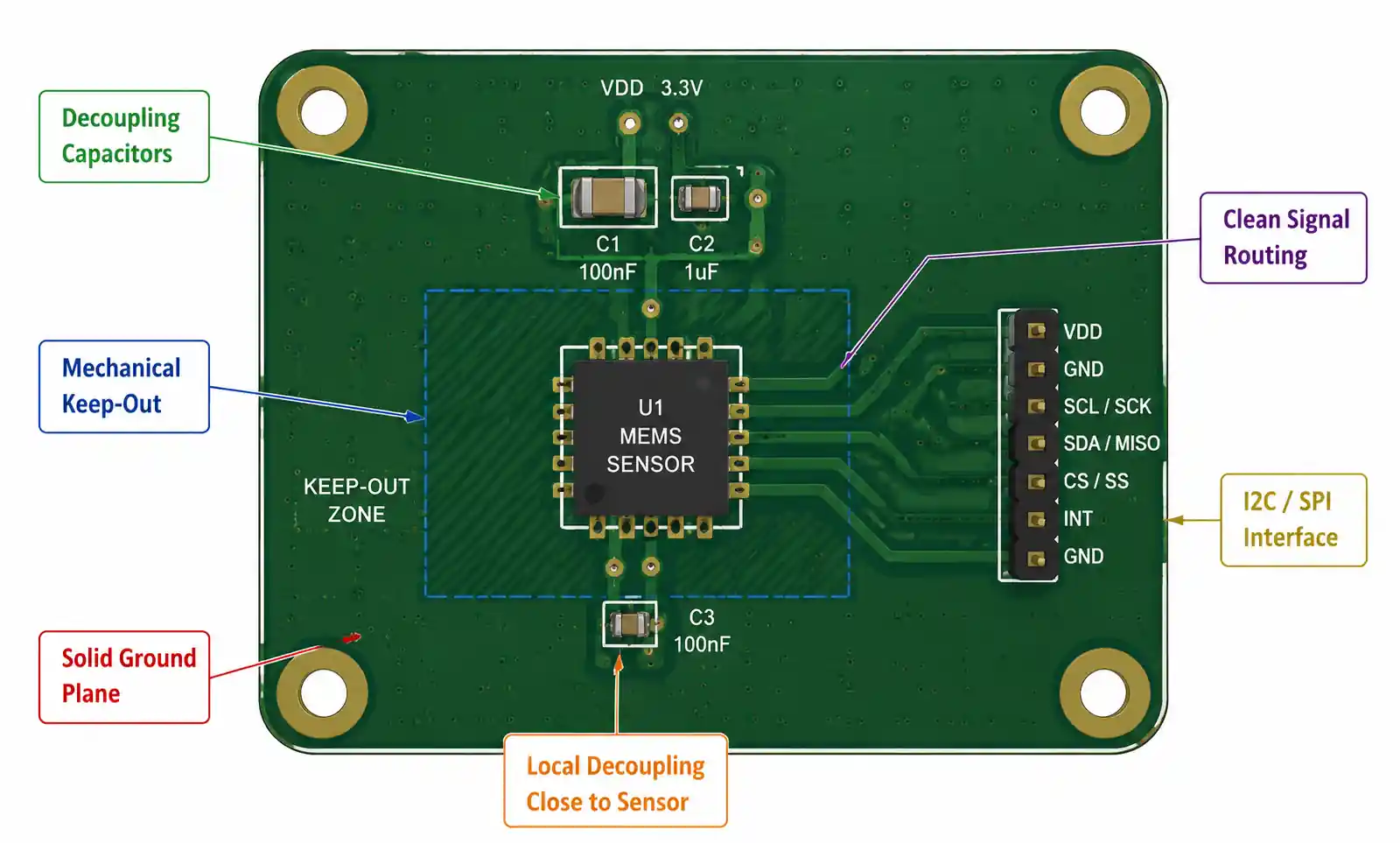
Cảm biến MEMS chứa các cấu trúc cơ học lơ lửng phản ứng với ngoại lực. Bất kỳ ứng suất cơ học nào được truyền qua PCB đều ảnh hưởng đến số đọc của cảm biến. Gắn cảm biến MEMS cách xa các cạnh bo mạch, lỗ lắp và các khu vực có ứng suất cao như điểm gắn đầu nối.
Sử dụng đồng rắn đổ dưới cảm biến để có độ cứng cơ học. Tránh định tuyến các dấu vết lớn hoặc cắt mặt phẳng trực tiếp dưới dấu chân cảm biến. Nếu PCB của bạn bị uốn cong đáng kể trong quá trình lắp ráp hoặc sử dụng, hãy xem xét thiết kế bo mạch nhỏ hơn để cách ly cảm biến khỏi ứng suất cơ học.
Đối với nguyên mẫu hàn tay, tránh nhiệt độ quá cao và áp suất cơ học trong quá trình lắp ráp. Reflow profile quan trọng — tuân theo chuyên gia khuyến nghị của nhà sản xuất cảm biếnfile nghiêm ngặt. Nhiệt độ đỉnh quá cao hoặc thời gian dài trên chất lỏng có thể làm hỏng các cấu trúc bên trong.
Lọc nguồn điện
Mặt trước tương tự cảm biến MEMS nhạy cảm với tiếng ồn của nguồn điện. Luôn đặt tụ gốm 100nF càng gần chân VDD của cảm biến càng tốt — lý tưởng nhất là trong vòng 2-3mm. Sử dụng điện môi X7R hoặc X5R, không phải Y5V, để có điện dung ổn định qua nhiệt độ.
Đối với các thiết kế quan trọng về tiếng ồn, hãy thêm tụ điện số lượng lớn 10μF gần cảm biến và xem xét hạt ferit hoặc bộ lọc LC trên đường cung cấp. Kiểm tra xem bảng dữ liệu của cảm biến có chỉ định tỷ lệ loại bỏ nguồn điện (PSRR) hay không — các thiết bị có PSRR kém dễ bị nhiễu kết hợp với nguồn cung cấp hơn.
Giữ nguồn cung cấp tương tự (VDDA) và nguồn cung cấp kỹ thuật số (VDDIO) riêng biệt nếu cảm biến cung cấp nguồn cung cấp phân chia. Sự cách ly này ngăn nhiễu chuyển mạch kỹ thuật số làm hỏng các phép đo tương tự.
Bố cục giao diện I2C và SPI
Bus I2C phải có điện trở nối tiếp (22-33Ω) gần thiết bị điều khiển để giảm đổ chuông tín hiệu và EMI. Các giá trị điện trở kéo lên phụ thuộc vào điện dung và tốc độ bus — các giá trị điển hình nằm trong khoảng từ 2.2kΩ đến 10kΩ. Kéo mạnh hơn (lực cản thấp hơn) hỗ trợ tốc độ nhanh hơn nhưng tăng mức tiêu thụ điện năng.
Đối với giao diện SPI, hãy giữ cho đồng hồ và dấu vết dữ liệu ngắn và khớp với độ dài của chúng để giảm thiểu độ lệch. Nếu xung nhịp SPI của bạn vượt quá 10MHz, hãy sử dụng dấu vết trở kháng được kiểm soát và xem xét điện trở kết thúc.
Tránh định tuyến tín hiệu I2C hoặc SPI gần nguồn điện chuyển mạch, dấu vết dòng điện cao hoặc cấu trúc ăng-ten. Các nguồn nhiễu này kết hợp với các giao diện kỹ thuật số nhạy cảm và gây ra lỗi giao tiếp.
Định tuyến ngắt và GPIO
Đầu ra ngắt cảm biến MEMS phát hiện chuyển động tín hiệu, vượt ngưỡng hoặc trạng thái FIFO. Những gián đoạn này thường đánh thức MCU của bạn khỏi giấc ngủ, vì vậy chúng phải đáng tin cậy. Định tuyến tín hiệu ngắt trên các lớp bên trong hoặc che chắn chúng bằng dấu vết mặt đất để ngăn kích hoạt sai từ EMI.
Không sử dụng tín hiệu ngắt cho bất kỳ thứ gì ngoại trừ đầu vào MCU — tránh chia sẻ các mạng này với các chức năng hoặc thiết bị khác. Kiểm tra đặc tính điện của chân ngắt: một số cảm biến sử dụng đầu ra cống hở yêu cầu kéo lên bên ngoài, trong khi những cảm biến khác cung cấp đầu ra đẩy-kéo.
Cân nhắc nhiệt
Cảm biến MEMS thể hiện độ lệch bù phụ thuộc vào nhiệt độ. Tránh đặt các thành phần sinh nhiệt (bộ điều chỉnh công suất, bộ xử lý tốc độ cao, bộ khuếch đại công suất RF) gần cảm biến MEMS của bạn. Ngay cả một vài độ tự nóng từ các bộ phận lân cận cũng có thể gây ra sai số đo.
Nếu không thể cách ly nhiệt, hãy thực hiện bù nhiệt độ trong chương trình cơ sở bằng đầu ra nhiệt độ tích hợp của cảm biến. Hiệu chuẩn đa điểm trong phạm vi nhiệt độ hoạt động của bạn sẽ hữu ích, nhưng nó làm tăng thêm độ phức tạp và chi phí sản xuất.
6. Những cạm bẫy thiết kế phổ biến và cách tránh chúng
Sau khi xem xét hàng trăm thiết kế cảm biến MEMS, một số lỗi nhất định xuất hiện nhiều lần. Dưới đây là những thứ gây đau đớn nhất.
Bỏ qua các hiệu ứng ứng suất cơ học
Uốn cong PCB trong quá trình sản xuất, lắp ráp hoặc vận hành truyền ứng suất vào cảm biến MEMS. Căng thẳng này biểu hiện dưới dạng sự thay đổi bù đắp hoặc thay đổi độ nhạy. Tôi đã thấy các thiết kế trong đó chỉ số gia tốc kế thay đổi 50mg chỉ từ việc siết chặt các vít vỏ.
Cách khắc phục: cách ly cơ học các cảm biến MEMS khỏi các điểm tập trung ứng suất. Sử dụng giá đỡ cao su hoặc miếng đệm giữa PCB và vỏ bọc. Nếu sản phẩm của bạn bị rung hoặc sốc cao, hãy cân nhắc đặt khu vực cảm biến bằng vật liệu tuân thủ.
Lọc nguồn điện không đủ
Bộ điều chỉnh chuyển mạch và bộ chuyển đổi DC-DC tạo ra nhiễu tần số cao ghép nối với nguồn cung cấp cảm biến MEMS. Tiếng ồn này làm tăng độ không đảm bảo đo lường và giảm độ phân giải hiệu quả. Một thiết kế có thể cho thấy hiệu suất tuyệt vời của băng ghế dự bị với nguồn cung cấp phòng thí nghiệm sạch, sau đó không thành công trong sản xuất vì nguồn điện của hệ thống thực tế bị ồn.
Cách khắc phục: Luôn kiểm tra với nguồn điện sản xuất cuối cùng của bạn, không phải nguồn cung cấp cho phòng thí nghiệm. Thêm bộ lọc LC hoặc RC trên nguồn cung cấp cảm biến nếu bạn thấy hiệu suất suy giảm liên quan đến tiếng ồn. Đo nhiễu nguồn cung cấp tại chân cảm biến bằng máy hiện sóng — đừng cho rằng nguồn điện của bạn sạch.
Đánh giá thấp các yêu cầu hiệu chuẩn
Hiệu chuẩn tại nhà máy bao gồm độ lệch và độ nhạy ở nhiệt độ phòng, nhưng cảm biến MEMS trôi dạt theo nhiệt độ, tuổi và ứng suất cơ học. Các ứng dụng yêu cầu độ chính xác tốt hơn 1% thường cần hiệu chuẩn trong hệ thống.
Cách khắc phục: Thiết kế hiệu chuẩn vào quy trình sản xuất của bạn ngay từ đầu. Đối với gia tốc kế, điều này có nghĩa là đo đầu ra theo nhiều hướng (thường là sáu vị trí) và tính toán sai số bù và độ nhạy. Đối với con quay hồi chuyển, hãy đo độ lệch tỷ lệ bằng không ở nhiều nhiệt độ. Ngân sách 30-60 giây cho mỗi đơn vị để hiệu chuẩn — thời gian này cộng lại trong sản xuất số lượng lớn.
Yêu cầu ứng dụng và cảm biến không phù hợp
Chọn cảm biến hiệu suất cao khi một thiết bị cơ bản là đủ sẽ lãng phí tiền bạc và điện năng. Ngược lại, việc chọn một cảm biến không được xác định để đạt được các mục tiêu chi phí tạo ra các vấn đề về hiệu suất có thể không xuất hiện cho đến khi bắt đầu sản xuất.
Cách khắc phục: Viết ra các yêu cầu thực tế của bạn về phạm vi, độ phân giải, tiếng ồn, băng thông và công suất trước khi mua cảm biến. Để lại lợi nhuận cho sự thay đổi sản xuất và môi trường khắc nghiệt, nhưng đừng chỉ định quá 10 lần chỉ để an toàn. Nguyên mẫu với cảm biến mục tiêu của bạn, không phải bo mạch phát triển, để xác nhận hiệu suất trong thế giới thực.
Giả định tích hợp chương trình cơ sở
Bảng dữ liệu cảm biến MEMS cung cấp bản đồ thanh ghi và giao thức truyền thông, nhưng chúng hiếm khi giải thích các sắc thái của việc khởi tạo thiết bị một cách chính xác, xử lý các điều kiện lỗi hoặc tối ưu hóa mức tiêu thụ điện năng. Người dùng lần đầu thường gặp khó khăn với cấu hình phù hợp.
Cách khắc phục: Sử dụng mã trình điều khiển do nhà cung cấp cung cấp làm điểm bắt đầu, ngay cả khi bạn định viết chương trình cơ sở tùy chỉnh. Mã nhà cung cấp thường xử lý các trình tự khởi tạo, yêu cầu về thời gian và các điều kỳ quặc về cấu hình không rõ ràng từ biểu dữ liệu. Tham gia diễn đàn nhà phát triển của nhà cung cấp hoặc liên hệ với bộ phận hỗ trợ của FAE nếu bạn gặp sự cố tích hợp.
Bỏ qua sự ổn định lâu dài
Cảm biến MEMS trôi theo thời gian do giãn vật liệu, sự phát triển của ứng suất bao bì và tiếp xúc với môi trường. Một cảm biến hoạt động hoàn hảo trong quá trình sản xuất ban đầu có thể cho thấy sự thay đổi bù đắp đáng kể sau sáu tháng tại hiện trường.
Cách khắc phục: Yêu cầu dữ liệu ổn định lâu dài từ nhà cung cấp cảm biến của bạn. Đối với các ứng dụng quan trọng, hãy thực hiện tự hiệu chuẩn định kỳ hoặc yêu cầu người dùng thực hiện các quy trình hiệu chuẩn. Một số cảm biến MEMS tiên tiến bao gồm các tính năng tự kiểm tra và hiệu chuẩn tích hợp giúp duy trì độ chính xác trong suốt thời gian sử dụng sản phẩm.
7. Câu hỏi thường gặp
Sự khác biệt giữa cảm biến MEMS đầu ra tương tự và kỹ thuật số là gì?
Cảm biến đầu ra tương tự cung cấp điện áp tỷ lệ thuận với thông số đo, yêu cầu ADC bên ngoài để xử lý kỹ thuật số. Cảm biến đầu ra kỹ thuật số tích hợp ADC và giao tiếp qua I2C hoặc SPI. Cảm biến kỹ thuật số đơn giản hóa thiết kế và giảm số lượng thành phần, nhưng cảm biến tương tự có thể cung cấp độ trễ thấp hơn và dễ dàng giao tiếp hơn với chuỗi tín hiệu tương tự. Đối với các thiết kế hiện đại tích hợp MCU, cảm biến kỹ thuật số thường là lựa chọn tốt hơn trừ khi bạn có yêu cầu xử lý tương tự cụ thể.
Làm cách nào để tính toán phạm vi gia tốc kế MEMS cần thiết cho ứng dụng của tôi?
Cộng tất cả các nguồn gia tốc mà thiết bị của bạn trải nghiệm: trọng lực (1g), chuyển động dự định (ví dụ: 3g để phát hiện cử chỉ) và các sự kiện va đập/va đập (có thể là 10-100g tùy thuộc vào sản phẩm). Thêm 20-30% lợi nhuận cho các điều kiện bất ngờ. Ví dụ: một thiết bị theo dõi thể dục có thể gặp phải trọng lực 1g + 2g từ chuyển động của cánh tay + 10g sốc rơi, gợi ý cảm biến ±16g có lề. Đừng quên rằng các ứng dụng máy đo độ nghiêng cần giải quyết các thành phần trọng lực, vì vậy phạm vi cao hơn sẽ làm giảm độ phân giải độ nghiêng.
Tôi có thể sử dụng cùng một cảm biến MEMS trên nhiều biến thể sản phẩm với các yêu cầu khác nhau không?
Đôi khi, nhưng hãy cẩn thận. Nhiều cảm biến MEMS cung cấp phạm vi có thể lập trình, cài đặt bộ lọc và chế độ nguồn cho phép một thiết bị phục vụ nhiều trường hợp sử dụng. Tuy nhiên, hiệu suất tối ưu thường yêu cầu các cảm biến được thiết kế có mục đích. Gia tốc kế có độ ồn thấp, công suất thấp để đếm bước sẽ không xử lý tốt việc phát hiện va chạm g cao. Đánh giá xem một cảm biến duy nhất có thực sự đáp ứng tất cả các yêu cầu hay bạn đang ảnh hưởng đến hiệu suất để giảm độ phức tạp của BOM.
Điều gì gây ra độ lệch bù tỷ lệ bằng không của con quay hồi chuyển MEMS?
Độ lệch tỷ lệ bằng không (số đọc đầu ra khi cảm biến không quay) bị trôi do thay đổi nhiệt độ, ứng suất cơ học và đi bộ ngẫu nhiên vốn có. Nhiệt độ là yếu tố đóng góp lớn nhất — độ lệch con quay hồi chuyển thường thay đổi 0,01-0,1 ° / s trên mỗi độ C. Sự trôi dạt này kết hợp trong các ứng dụng tính toán chết, khiến ước tính vị trí phân kỳ theo thời gian. Con quay hồi chuyển tốt hơn có hệ số nhiệt độ thấp hơn và bù nhiệt độ tích hợp, nhưng không có con quay hồi chuyển MEMS nào không bị trôi. Hoạt động lâu dài yêu cầu định kỳ làm lại bằng cách sử dụng các tham chiếu bên ngoài (GPS, từ kế hoặc phát hiện tĩnh).
Tôi có nên triển khai thuật toán hợp nhất cảm biến của riêng mình hay sử dụng thư viện của nhà cung cấp?
Các thuật toán kết hợp cảm biến do nhà cung cấp cung cấp (như BSX của Bosch, MotionFX của ST hoặc Bộ xử lý chuyển động kỹ thuật số của InvenSense) tiết kiệm đáng kể thời gian phát triển và được thử nghiệm kỹ lưỡng trên hàng triệu đơn vị. Sử dụng chúng trừ khi bạn có các yêu cầu cụ thể mà chúng không đáp ứng hoặc bạn đang xây dựng lợi thế cạnh tranh thông qua các thuật toán tùy chỉnh. Việc triển khai hợp nhất cảm biến mạnh mẽ từ đầu đòi hỏi sự hiểu biết sâu sắc về lọc Kalman, toán học bậc bốn và thử nghiệm thực tế sâu rộng. Ngân sách 3-6 tháng thời gian kỹ thuật nếu đi tùy chỉnh.
Làm cách nào để chọn giữa gia tốc kế MEMS điện dung và áp điện?
Gia tốc kế MEMS điện dung đo DC đến vài kHz, tiêu thụ điện năng thấp và thống trị các ứng dụng tiêu dùng / công nghiệp. Gia tốc kế áp điện có đầu ra kết hợp AC (không thể đo độ nghiêng tĩnh), băng thông cao hơn (DC đến 10kHz +) và hiệu suất tốt hơn trong giám sát độ rung. Chọn điện dung để cảm biến độ nghiêng, theo dõi hướng hoặc đo bước chân. Chọn áp điện để phân tích rung động, phát hiện va đập hoặc giám sát kết cấu tần số cao.
Tôi nên thực hiện kiểm tra gì để xác thực tích hợp cảm biến MEMS?
Tối thiểu: xác minh giao tiếp (đọc thanh ghi WHO_AM_I hoặc tương đương), kiểm tra đầu ra ở các hướng đã biết (gia tốc kế), xác minh bù nhiệt độ trong phạm vi hoạt động của bạn, kiểm tra chức năng ngắt, đo mức tiêu thụ điện năng ở tất cả các chế độ hoạt động và thực hiện kiểm tra ESD trên các chân cảm biến. Đối với sản xuất, thực hiện hiệu chuẩn tự động và kiểm tra chức năng. Ngân sách cho thử nghiệm môi trường (chu kỳ nhiệt độ, tiếp xúc với độ ẩm, sốc cơ học) nếu ứng dụng của bạn có yêu cầu về độ tin cậy ngoài mục đích sử dụng thông thường của người tiêu dùng.
Sự gián đoạn chuỗi cung ứng ảnh hưởng như thế nào đến tính khả dụng của cảm biến MEMS?
Cảm biến MEMS yêu cầu các quy trình chế tạo chuyên biệt và hầu hết các nhà cung cấp vận hành nhà máy của riêng họ (STMicroelectronics, Bosch Sensortec) hoặc sử dụng các xưởng đúc MEMS chuyên dụng (Silex, Teledyne DALSA). Sự tích hợp theo chiều dọc này mang lại sự ổn định chuỗi cung ứng tốt so với các công ty hoàn toàn không có nhà máy, nhưng thời gian giao hàng vẫn có thể kéo dài đến 20-30 tuần trong thời gian nhu cầu cao. Thiết lập mối quan hệ với các nhà phân phối được ủy quyền, cam kết dự báo khối lượng và duy trì 3-6 tháng dự trữ đệm cho các thiết kế sản xuất. Cân nhắc tìm nguồn kép cho các sản phẩm khối lượng lớn, nhưng xác nhận hiệu suất một cách cẩn thận—cảm biến MEMS từ các nhà cung cấp khác nhau hiếm khi hoạt động giống hệt nhau ngay cả với các thông số kỹ thuật tương tự.
8. Kết luận
Việc lựa chọn cảm biến MEMS phù hợp đòi hỏi phải cân bằng giữa hiệu suất kỹ thuật, mức tiêu thụ điện năng, chi phí và cân nhắc chuỗi cung ứng. Bắt đầu bằng cách xác định rõ ràng các yêu cầu ứng dụng của bạn: phạm vi đo, độ phân giải, băng thông, phạm vi nhiệt độ và ngân sách năng lượng. Sử dụng các yêu cầu này để thu hẹp lĩnh vực xuống một số ít ứng viên, sau đó tạo nguyên mẫu với các lựa chọn hàng đầu của bạn để xác nhận hiệu suất trong thế giới thực.
Đừng đánh giá thấp các thách thức tích hợp—bố cục PCB, cách ly ứng suất cơ học và tích hợp chương trình cơ sở đều ảnh hưởng đến việc cảm biến MEMS của bạn có cung cấp hiệu suất bảng dữ liệu trong sản phẩm cuối cùng của bạn hay không. Thời gian ngân sách cho việc phát triển hiệu chuẩn và kiểm tra xác thực, đặc biệt nếu ứng dụng của bạn yêu cầu độ chính xác tốt hơn 5%.
Đối với các ứng dụng trong thị trường ô tô, y tế hoặc công nghiệp, hãy tham gia với các nhà cung cấp cảm biến sớm trong chu kỳ thiết kế của bạn. Hỗ trợ FAE có thể giúp bạn điều hướng các yêu cầu về trình độ, hiểu các đặc điểm ổn định lâu dài và tối ưu hóa thiết kế của bạn để có khả năng sản xuất.
Nếu bạn đang hoàn thiện việc lựa chọn thành phần cho một dự án sắp tới, hãy tải xuống bảng dữ liệu chi tiết cho các cảm biến trong danh sách rút gọn của bạn và xem lại các ghi chú ứng dụng cụ thể cho thị trường mục tiêu của bạn. Hầu hết các nhà cung cấp MEMS đều cung cấp các thiết kế tham khảo và bảng đánh giá cho phép bạn tạo nguyên mẫu nhanh chóng. Đối với các câu hỏi tích hợp phức tạp hoặc yêu cầu tùy chỉnh, hãy liên hệ với bộ phận hỗ trợ kỹ thuật — các nhà cung cấp muốn thiết kế của bạn thành công và thường đáp ứng các yêu cầu kỹ thuật chính hãng.