

Hướng dẫn đầy đủ về bộ điều khiển mực nước tự động sử dụng bộ hẹn giờ 555
Bộ điều khiển mực nước tự động được sử dụng rộng rãi trong các hệ thống quản lý nước dân dụng, nông nghiệp và công nghiệp để tự động hóa hoạt động của máy bơm và ngăn tràn bể hoặc chạy khô. Trong số các giải pháp điều khiển khác nhau, các mạch được xây dựng xung quanh bộ hẹn giờ NE555 vẫn phổ biến vì tính đơn giản, độ tin cậy và chi phí thấp.
Bài viết này cung cấp phân tích kỹ thuật của bộ điều khiển mực nước tự động dựa trên bộ hẹn giờ 555. Nó giải thích nguyên lý làm việc, cơ chế cảm biến, mạch truyền động rơ le, thiết kế nguồn điện và các cân nhắc lắp đặt thực tế . Mục tiêu là cung cấp cho các kỹ sư và những người đam mê điện tử hiểu sâu hơn về cách thiết kế bộ điều khiển ổn định và đáng tin cậy cho các hệ thống bể nước trong thế giới thực.
Mục lục
- [1. Bộ điều khiển mực nước tự động là gì] (# 1-bộ điều khiển mực nước tự động là gì)
- [2. Hoạt động hẹn giờ 555 trong kiểm soát mực nước] (# 2-555-hẹn giờ-hoạt động-trong-điều khiển mực nước)
- [3. Nguyên tắc hoạt động của hệ thống] (# 3-nguyên tắc hoạt động của hệ thống)
- [4. Trình điều khiển rơ le, điều khiển máy bơm và nguồn điện] (# 4-relay-driver-pump-control-and-power-supply)
- [5. Phát hiện mực nước dựa trên đầu dò] (# 5-đầu dò-dựa trên đầu dò-phát hiện mực nước)
- [6. Thiết kế và lắp đặt cơ khí cảm biến phao] (# 6-float-sensor-mechanical-design-and-installation)
- [7. Ưu điểm và hạn chế] (# 7-ưu điểm và hạn chế)
- [8. Câu hỏi thường gặp](#8-câu hỏi thường gặp)
- [9. Kết luận] (# 9-kết luận)
1. Bộ điều khiển mực nước tự động là gì
Bộ điều khiển mực nước tự động là một hệ thống điều khiển điện tử được thiết kế để điều chỉnh hoạt động của máy bơm nước dựa trên mực nước bên trong bể chứa.
Chức năng cơ bản của nó rất đơn giản:
- Khởi động máy bơm khi nước giảm xuống dưới mức tối thiểu
- Dừng máy bơm khi nước đạt mức tối đa
Nếu không có tự động hóa, các bể thường được giám sát thủ công, điều này thường dẫn đến:
- Nước tràn
- Bơm chạy khô
- Tiêu thụ điện quá mức
- Tăng mài mòn cơ học
Bộ điều khiển tự động loại bỏ những vấn đề này bằng cách liên tục theo dõi mực nước và điều khiển máy bơm cho phù hợp.
Một hệ thống điển hình bao gồm ba hệ thống con chính:
- Bộ phận cảm biến mực nước
- Mạch logic điều khiển
- Giao diện chuyển mạch máy bơm (rơ le hoặc công tắc tơ)
Bộ đếm thời gian 555 hoạt động như yếu tố logic điều khiển trong thiết kế này.
2. 555 Hoạt động hẹn giờ trong kiểm soát mực nước
IC hẹn giờ NE555 là một trong những mạch tích hợp tương tự được sử dụng rộng rãi nhất trong thiết bị điện tử điều khiển. Mặc dù thường được sử dụng trong bộ dao động và bộ hẹn giờ, nhưng nó cũng có thể hoạt động như một chốt ổn định, lý tưởng để kiểm soát mực nước.
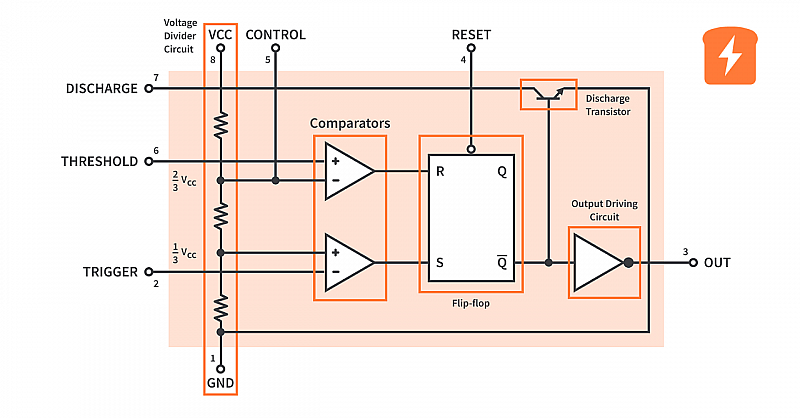
Các chân chính được sử dụng trong mạch này bao gồm:
| Ghim | Tên | Chức năng |
|---|---|---|
| 2 | Kích hoạt | Kích hoạt máy bơm khi voltage giảm xuống dưới 1/3 Vcc |
| 4 | Xóa và làm lại | Buộc đầu ra THẤP khi kéo xuống đất |
| 3 | Đầu ra | Điều khiển bóng bán dẫn và rơ le |
| 8 | Nhựa VCC | Cung cấp năng lượng |
| 1 | GND | Tham chiếu mặt đất |
Hoạt động Bistable
Trong ứng dụng này, bộ hẹn giờ 555 hoạt động ở chế độ hai bền, có nghĩa là nó có hai trạng thái ổn định:
- Trạng thái BẬT máy bơm
- Trạng thái TẮT máy bơm
Trạng thái chỉ thay đổi khi tín hiệu kích hoạt hoặc đặt lại được áp dụng. Hành vi này rất quan trọng vì nó ngăn chặn chuyển đổi nhanh do dao động nước nhỏ hoặc nhiễu loạn bên trong bể.
Logic điều khiển hoạt động như sau:
- Chốt kích hoạt được kích hoạt → BẬT máy bơm
- Đặt lại chân được kích hoạt → TẮT máy bơm
Khi đầu ra thay đổi trạng thái, nó vẫn ở đó cho đến khi đầu vào ngược lại được kích hoạt.
3. Nguyên tắc hoạt động của hệ thống
Két nước sử dụng hai cảm biến mức :
- Cảm biến mức thấp (khởi động máy bơm)
- Cảm biến mức cao (dừng bơm)
Các cảm biến này cung cấp tín hiệu cho đầu vào kích hoạt và đặt lại của bộ hẹn giờ 555.
Điều kiện khởi động máy bơm
Khi nước giảm xuống dưới ngưỡng tối thiểu :
- Cảm biến mức thấp hoạt động
- Chân kích hoạt (Chân 2) THẤP
- Công tắc đầu ra 555 CAO
- Rơle kích hoạt
- Máy bơm bắt đầu đổ đầy bể
Điều kiện dừng bơm
Khi nước đạt đến ngưỡng tối đa :
- Cảm biến mức cao kích hoạt
- Đặt lại chân (Chân 4) THẤP
- Công tắc đầu ra THẤP
- Phát hành rơle
- Dừng bơm
Bởi vì hệ thống sử dụng hai mức cảm biến riêng biệt, nó tự nhiên đưa ra độ trễ, ngăn chặn chu kỳ bơm thường xuyên.
4. Trình điều khiển rơ le, điều khiển máy bơm và nguồn điện
Đầu ra của bộ hẹn giờ 555 không thể điều khiển trực tiếp động cơ hoặc thiết bị dòng điện cao , vì vậy cần phải có giai đoạn chuyển mạch trung gian.
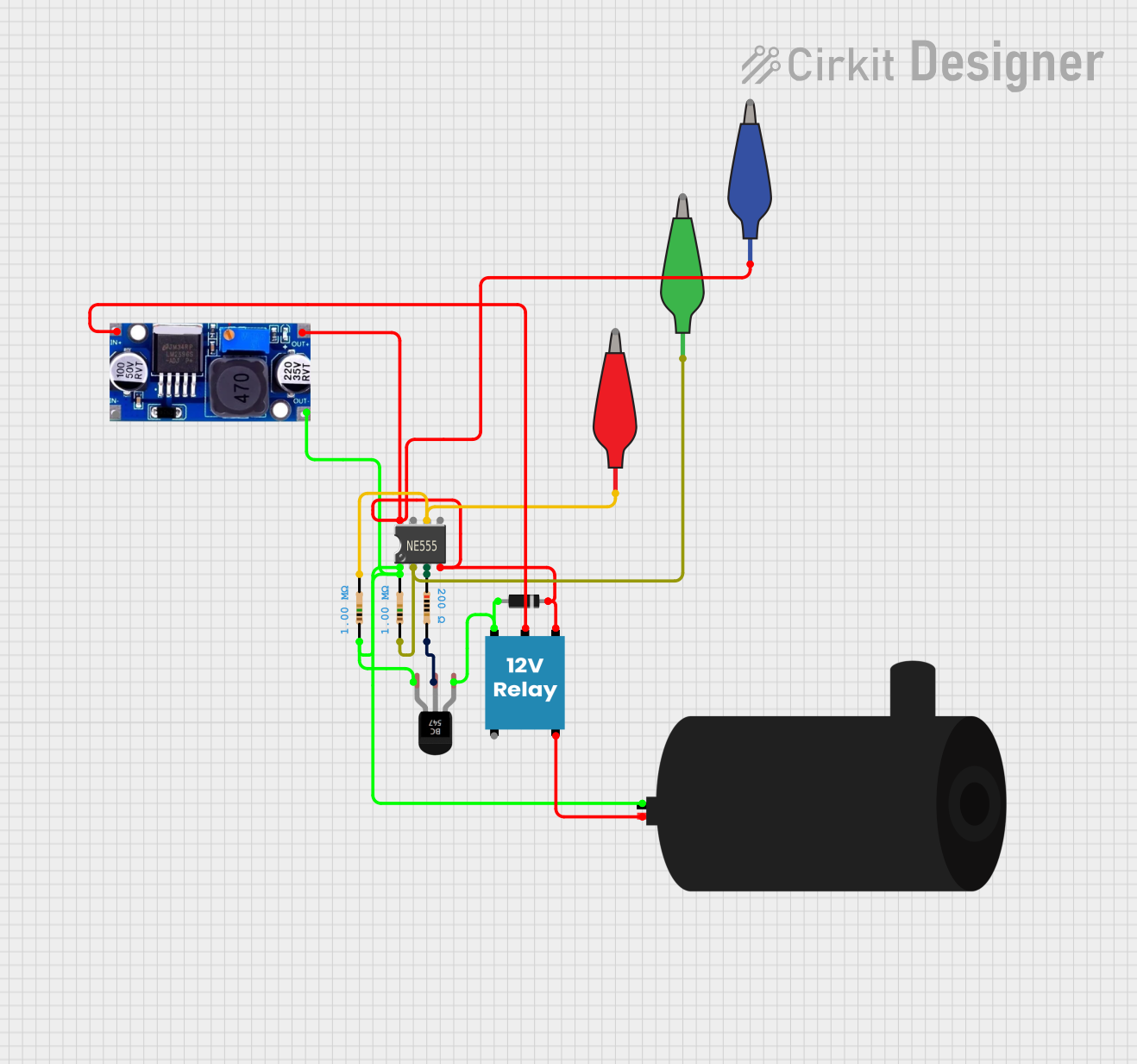
Giai đoạn trình điều khiển bóng bán dẫn
Một bóng bán dẫn NPN (chẳng hạn như 2N2222 hoặc BC547) thường được sử dụng.
Hoạt động:
- Đầu ra 555 điều khiển đế bóng bán dẫn thông qua một điện trở
- Bóng bán dẫn bão hòa
- Cuộn dây rơ le cung cấp năng lượng
- Tiếp điểm rơ le chuyển đổi công suất bơm
Bảo vệ Flyback
Một diode flyback được đặt trên cuộn dây rơle để triệt tiêu lực điện động ngược (EMF) được tạo ra khi rơle tắt. Nếu không có diode này, voltage tăng đột biến có thể làm hỏng bóng bán dẫn hoặc IC 555.
Giao diện nguồn máy bơm
Đối với máy bơm nhỏ:
- Một rơ le 12V là đủ.
Đối với máy bơm lớn hơn:
- Sử dụng công tắc tơ được đánh giá ít nhất là 1.5 × dòng điện của động cơ .
Điều này đảm bảo hoạt động an toàn trong điều kiện hiện tại khởi động.
Thiết kế nguồn điện
Cần có nguồn điện ổn định 12V DC .
Các công đoạn điển hình bao gồm:
- Máy biến áp bước xuống
- Bộ chỉnh lưu cầu
- Tụ lọc
- Bộ điều chỉnh điện áp (ví dụ: 7812)
Lọc thích hợp ngăn chặn kích hoạt sai do nhiễu điện .
5. Phát hiện mực nước dựa trên đầu dò
Thay vì phao cơ học, có thể sử dụng hệ thống cảm biến dựa trên đầu dò.
Phương pháp này dựa vào độ dẫn điện của nước .
Ba điện cực được lắp đặt bên trong bể:
- Đầu dò chung
- Đầu dò mức thấp
- Đầu dò mức cao
Nguyên tắc làm việc
Khi nước tiếp xúc với đầu dò:
- Một đường dẫn điện hình thành giữa đầu dò và điện cực chung
- Một dòng điện nhỏ chạy
- Mạch điều khiển phát hiện sự thay đổi
- Chuyển đổi trạng thái máy bơm cho phù hợp
Cân nhắc thiết kế
Để đảm bảo hoạt động đáng tin cậy:
- Sử dụng đầu dò thép không gỉ
- Giữ điện áp cảm biến dưới 12V
- Giới hạn dòng điện ở mức microampe
Điều này làm giảm điện phân và ăn mòn, kéo dài tuổi thọ đầu dò.
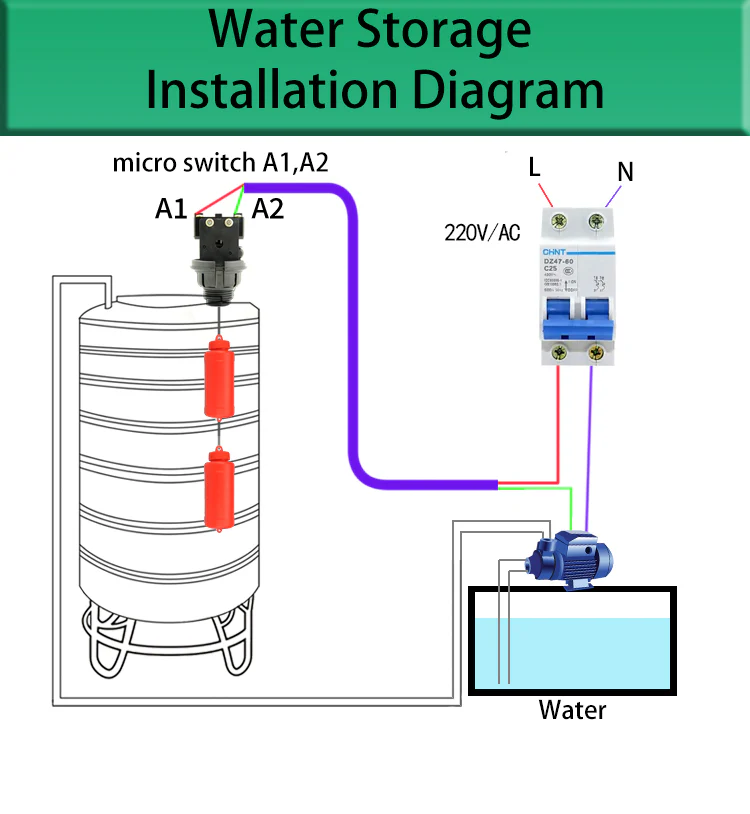
6. Thiết kế và lắp đặt cơ khí cảm biến phao
Cảm biến phao được sử dụng rộng rãi do tính đơn giản và độ tin cậy cơ học của chúng.
Cấu hình chiều dài cảm biến
Hai phao được lắp đặt ở các độ cao khác nhau:
| Cảm biến | Chức vụ | Chức năng |
|---|---|---|
| Phao mức thấp | Gần đầu ra bể chứa | Khởi động máy bơm |
| Phao cấp cao | Gần áo ba lỗ | Dừng bơm |
Khoảng cách thích hợp giữa các mức này đảm bảo độ trễ kiểm soát ổn định.
Vỏ PVC bảo vệ
Phao thường được lắp đặt bên trong ống PVC thẳng đứng để bảo vệ chúng khỏi:
- Nhiễu loạn
- Các mảnh vụn trôi nổi
- Dòng nước do máy bơm gây ra
Các tính năng xây dựng chính:
- Lỗ 5 mm ở nắp trên để di chuyển thanh
- Lỗ vào nước ở nắp đáy
- Các bức tường bên trong nhẵn cho chuyển động không ma sát
Kiểm tra trước khi cài đặt
Trước khi cài đặt:
- Xác minh chuyển động phao
- Kiểm tra tính liên tục của công tắc bằng đồng hồ vạn năng
- Kiểm tra bộ điều khiển với tải nhỏ
Các bước này ngăn ngừa lỗi cài đặt.
7. Ưu điểm và hạn chế
Ưu điểm
- Ngăn tràn bể
- Bảo vệ máy bơm khỏi chạy khô
- Giảm giám sát thủ công
- Tiết kiệm điện
- Kéo dài tuổi thọ động cơ
- Yêu cầu bảo trì thấp
Hạn chế
- Chi phí lắp đặt ban đầu cao hơn một chút
- Công tắc phao có thể bị kẹt do các mảnh vụn
- Cảm biến đầu dò có thể bị ăn mòn theo thời gian
- Nước rất tinh khiết có độ dẫn điện thấp cho hệ thống đầu dò
- Lỗi mạch điều khiển dừng tự động hóa
8. Câu hỏi thường gặp
1. Tại sao bộ hẹn giờ 555 phù hợp với bộ điều khiển mực nước?
Bộ hẹn giờ 555 có thể hoạt động ở chế độ ổn định , hoạt động giống như một chốt bộ nhớ. Điều này cho phép máy bơm vẫn BẬT hoặc TẮT cho đến khi cảm biến mức ngược lại được kích hoạt, ngăn chuyển đổi nhanh chóng.
2. Mạch có thể điều khiển máy bơm công nghiệp lớn không?
Có, nhưng rơle phải được thay thế bằng công tắc tơ động cơ được đánh giá cho dòng điện và điện áp của máy bơm.
3. Loại cảm biến nào đáng tin cậy hơn: phao hay đầu dò?
- Cảm biến phao đáng tin cậy về mặt cơ học và không bị ảnh hưởng bởi độ dẫn nước.
- Cảm biến đầu dò đơn giản hơn nhưng yêu cầu vật liệu chống ăn mòn.
4. Nguồn cung cấp voltage được khuyến nghị?
Hầu hết các thiết kế hoạt động bằng cách sử dụng 12V DC , cung cấp điện áp cảm biến an toàn và hoạt động rơ le đáng tin cậy.
5. Làm thế nào để tránh kích hoạt sai?
Sử dụng:
- Lọc nguồn điện thích hợp
- Hệ thống dây cảm biến được bảo vệ
- Độ trễ đầy đủ giữa các cảm biến mức
Các phương pháp thiết kế này cải thiện đáng kể độ ổn định của hệ thống.
9. Kết luận
Bộ điều khiển mực nước tự động dựa trên bộ hẹn giờ 555 cung cấp một giải pháp đơn giản và hiệu quả để quản lý bể chứa nước. Bằng cách kết hợp cảm biến mức, logic lưỡng ổn định và trình điều khiển rơle, hệ thống có thể điều khiển hoạt động của máy bơm một cách đáng tin cậy với các thành phần tối thiểu.
Khi được thiết kế chính xác, bộ điều khiển có thể:
- Ngăn ngừa lãng phí nước
- Bảo vệ động cơ bơm
- Giảm tiêu thụ điện
- Cải thiện độ tin cậy tổng thể của hệ thống
Mặc dù các giải pháp vi điều khiển hiện đại tồn tại, bộ hẹn giờ 555 vẫn là một lựa chọn mạnh mẽ và chi phí thấp, đặc biệt là đối với các hệ thống quản lý nước quy mô nhỏ.