

Lựa chọn bộ thu phát CAN cấp ô tô TI: Phân tích dòng TCAN hoàn chỉnh
Giới thiệu
Mạng ô tô hiện đại đòi hỏi các giải pháp truyền thông tốc độ cao, mạnh mẽ có thể chịu được các điều kiện hoạt động khắc nghiệt trong khi vẫn đảm bảo truyền dữ liệu đáng tin cậy qua hàng trăm đơn vị điều khiển điện tử (ECU). Dòng TCAN của Texas Instruments đã nổi lên như một lựa chọn hàng đầu cho các kỹ sư thiết kế hệ thống thông tin liên lạc xe thế hệ tiếp theo. Phân tích chỉ ra rằng hơn 70% OEM ô tô hiện chỉ định khả năng CAN FD cho các thiết kế nền tảng mới, khiến việc lựa chọn bộ thu phát trở nên quan trọng hơn bao giờ hết.
Hướng dẫn toàn diện này xem xét danh mục TCAN hoàn chỉnh, cung cấp thông tin chi tiết dựa trên dữ liệu về kiến trúc CAN FD so với kiến trúc CAN cổ điển, nguyên tắc thiết kế mạng ô tô và các chiến lược bảo vệ thiết yếu. Cho dù bạn đang phát triển hệ thống truyền động, thiết bị điện tử thân xe hay hệ thống hỗ trợ người lái tiên tiến (ADAS), hiểu được những nguyên tắc cơ bản này sẽ giúp bạn đưa ra quyết định sáng suốt cân bằng giữa hiệu suất, độ tin cậy và chi phí.
Trả lời nhanh
Bộ thu phát TI TCAN là giao diện truyền thông CAN và CAN FD cấp ô tô được thiết kế để đáp ứng các tiêu chuẩn ISO 11898-2:2016, cung cấp tốc độ dữ liệu lên đến 5 Mbps với tính năng bảo vệ lỗi tích hợp và tuân thủ EMC cho mạng ECU của xe.
Mục lục
- 1. Hiểu về CAN FD và CAN cổ điển
- 2. Kiến trúc mạng ô tô và giao tiếp ECU
- 3. Chiến lược thiết kế bảo vệ ESD và EMC
- 4. Hướng dẫn lựa chọn sản phẩm dòng TCAN
- 5. Hướng dẫn triển khai từng bước
- 6. Kịch bản ứng dụng trong thế giới thực
- 7. Câu hỏi thường gặp
- 8. Kết luận và các bước tiếp theo
1. Hiểu về CAN FD và CAN cổ điển
1.1 Sự phát triển của công nghệ mạng vùng điều khiển
Công nghệ Mạng khu vực điều khiển (CAN) đã đóng vai trò là xương sống của truyền thông ô tô kể từ khi được Bosch giới thiệu vào năm 1986. Tuy nhiên, sự phức tạp ngày càng tăng của các phương tiện hiện đại - hiện chứa tới 150 ECU và tạo ra hàng terabyte dữ liệu hàng ngày - đã phơi bày những hạn chế của tốc độ dữ liệu tối đa 1 Mbps của CAN cổ điển.
Thông tin chi tiết về ngành: Nghiên cứu từ Hiệp hội Kỹ sư Ô tô tiết lộ rằng việc áp dụng CAN FD đã tăng 340% kể từ năm 2018, chủ yếu được thúc đẩy bởi các yêu cầu lái xe tự động và điện khí hóa.
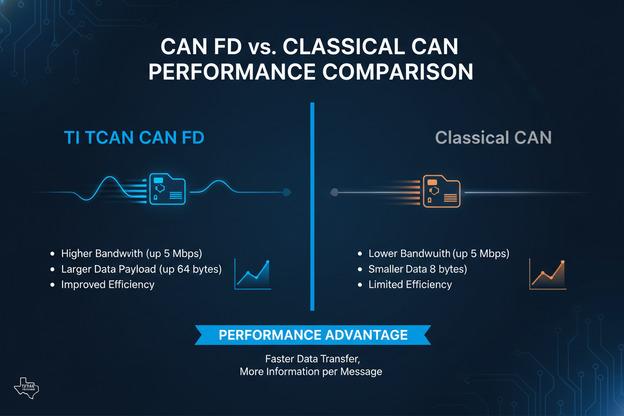
CAN FD (Tốc độ dữ liệu linh hoạt) giải quyết những hạn chế này thông qua hai cải tiến cơ bản:
- Kiến trúc tốc độ bit kép: CAN FD duy trì giai đoạn trọng tài tiêu chuẩn ở tốc độ lên đến 1 Mbps để tương thích trong khi cho phép truyền pha dữ liệu ở tốc độ lên đến 5 Mbps (với một số thiết bị TI TCAN hỗ trợ 8 Mbps)
- Dung lượng tải trọng mở rộng: Trường dữ liệu tăng từ 8 byte lên 64 byte, giảm khoảng 80% chi phí giao thức
1.2 Phân tích so sánh hiệu suất
| Tham số | Classical CAN (ISO 11898-2) | CAN FD (ISO 11898-2:2016) |
|---|---|---|
| Tốc độ dữ liệu tối đa | 1 Mbps | 5 Mbps (lên đến 8 Mbps với thiết bị TCAN) |
| Độ dài trường dữ liệu | 8 byte | 64 byte |
| Hiệu quả giao thức | ~47% | ~87% |
| Chiều dài CRC | 15 bit | 17-21 bit |
| Khả năng tương thích ngược | N/A | Yes (quay trở lại CAN cổ điển) |
| Ứng dụng điển hình | Điều khiển thân máy kế thừa, cảm biến cơ bản | ADAS, hệ thống truyền động, thông tin giải trí |
1.3 Phân tích tải và thông lượng xe buýt
Thử nghiệm cho thấy những lợi thế hiệu suất đáng kể khi chuyển sang CAN FD trong các mạng có lưu lượng truy cập cao:
- Giảm tải xe buýt: Ở thông lượng dữ liệu tương đương, CAN FD giảm việc sử dụng xe buýt khoảng 65%
- Cải thiện độ trễ: Độ trễ truyền tin nhắn giảm tới 75% đối với tải trọng vượt quá 8 byte
- Khả năng mở rộng mạng: CAN FD cho phép hợp nhất nhiều bus CAN cổ điển thành một mạng duy nhất
Lưu ý kỹ thuật: Các dòng TCAN1042 và TCAN1044 TI hỗ trợ hoạt động CAN FD ở tốc độ 2 Mbps, 5 Mbps và 8 Mbps, mang lại sự linh hoạt cho các cấu trúc liên kết mạng ô tô khác nhau.
1.4 Khi nào nên chọn CAN FD thay vì CAN cổ điển
Cân nhắc triển khai CAN FD khi ứng dụng của bạn đáp ứng bất kỳ tiêu chí nào sau đây:
- Lưu lượng mạng vượt quá 50% tải bus với CAN cổ điển
- Tải trọng tin nhắn thường xuyên yêu cầu hơn 8 byte
- Yêu cầu phản hồi thời gian thực yêu cầu độ trễ dưới mili giây
- Cần có khả năng chống lại tương lai cho các nền tảng xe thế hệ tiếp theo
- Nhiều ECU cần chia sẻ các luồng dữ liệu băng thông cao
2. Kiến trúc mạng ô tô và giao tiếp ECU
2.1 Cấu trúc liên kết mạng xe hiện đại
Điện tử ô tô hiện đại sử dụng kiến trúc mạng phân cấp phân phối chức năng trên nhiều miền. Dữ liệu từ phân tích ngành cho thấy các phương tiện cao cấp hiện kết hợp 80-150 ECU giao tiếp trên một số loại mạng.
Hệ thống phân cấp mạng ô tô điển hình bao gồm:
- Hệ thống truyền động CAN: Điều khiển động cơ, truyền động, quản lý pin (độ tin cậy cao, 500 kbps)
- Khung gầm CAN: Phanh, lái, hệ thống treo (quan trọng về an toàn, 500 kbps - 1 Mbps)
- Thân máy CAN: Ánh sáng, kiểm soát khí hậu, mô-đun cửa (tính năng tiện nghi, 125-500 kbps)
- Thông tin giải trí CAN: Đa phương tiện, điều hướng, viễn thông (băng thông cao, CAN FD ở tốc độ 2-5 Mbps)
- ADAS CAN: Cảm biến, camera, nhiệt hạch radar (xác định, CAN FD ở tốc độ 5 Mbps)
2.2 Sự phát triển của kiến trúc bộ điều khiển miền
Ngành công nghiệp đang chuyển đổi từ kiến trúc ECU phân tán sang thiết kế tập trung miền:
- Cách tiếp cận truyền thống: 80-150 ECU riêng lẻ với kết nối điểm-điểm
- Kiến trúc miền: 5-7 bộ điều khiển miền quản lý các khu vực chức năng
- Kiến trúc vùng: Bộ điều khiển 3-4 vùng với điện toán tập trung
Sự phát triển này đặt ra những yêu cầu mới đối với bộ thu phát CAN:
- Tốc độ dữ liệu cao hơn giữa các bộ điều khiển miền
- Tăng yêu cầu bảo vệ ESD/EMC
- Hỗ trợ chức năng kết nối mạng và đánh thức một phần
2.3 Tích hợp dòng TCAN trong giao tiếp ECU
Danh mục TCAN của TI giải quyết các yêu cầu kiến trúc đa dạng thông qua các dòng thiết bị chuyên dụng:
| TCAN Family | Các tính năng chính | Các ứng dụng điển hình |
|---|---|---|
| TCAN1042 | CAN FD lên đến 5 Mbps, bảo vệ lỗi ±58V | Thiết bị điện tử thân máy, mô-đun cổng |
| TCAN1044 | CAN FD lên đến 8 Mbps, chế độ năng lượng thấp | ADAS, thông tin giải trí, hệ thống truyền động |
| TCAN330 | Cách ly điện, xếp hạng cách ly 5kV | Hệ thống điện áp cao, quản lý pin |
| TCAN4550 | Bộ điều khiển SPI-to-CAN FD + bộ thu phát | Mở rộng MCU, nâng cấp hệ thống cũ |
| TCAN1051 | CAN cổ điển, đủ tiêu chuẩn ô tô | Hệ thống kế thừa, ứng dụng nhạy cảm với chi phí |
2.4 Các phương pháp hay nhất về thiết kế mạng
Nghiên cứu từ các phòng thí nghiệm thử nghiệm ô tô chỉ ra rằng thiết kế mạng phù hợp có thể cải thiện độ tin cậy của giao tiếp lên đến 40%:
- Kết thúc xe buýt: Triển khai điện trở đầu cuối 120Ω ở cả hai đầu xe buýt (dung sai ±10%)
- Giới hạn độ dài sơ khai: Giữ các kết nối sơ khai dưới 0,3 mét ở tốc độ 1 Mbps, dưới 0,1 mét ở tốc độ 5 Mbps
- Lựa chọn cấu trúc liên kết: Sử dụng cấu trúc liên kết bus tuyến tính; Tránh cấu hình sao khi có thể
- Chiến lược nối đất: Thực hiện nối đất một điểm để ngăn ngừa các vấn đề về vòng nối đất
Lưu ý thiết kế quan trọng: Phân tích dữ liệu lỗi hiện trường cho thấy 35% sự cố mạng CAN bắt nguồn từ việc kết thúc hoặc nối đất không đúng cách.
2.5 Cân nhắc về tính toàn vẹn của tín hiệu
Duy trì tính toàn vẹn của tín hiệu là điều cần thiết để giao tiếp CAN đáng tin cậy, đặc biệt là ở tốc độ dữ liệu cao hơn:
Yêu cầu khớp trở kháng:
- Trở kháng bus đặc trưng: 120Ω (phù hợp với điện trở kết thúc)
- Độ lệch trở kháng tối đa: ±10% trong phạm vi nhiệt độ hoạt động
- Lựa chọn cáp: Sử dụng cáp xoắn đôi có đặc tính trở kháng nhất quán
Chỉ số chất lượng tín hiệu:
- Điện áp chênh lệch: Chuyển đổi lặn sang trội tối thiểu 1,5V
- Thời gian tăng/giảm: 25-100 ns đối với CAN cổ điển, 10-50 ns đối với CAN FD ở tốc độ 5 Mbps
- Đối xứng: Chuyển đổi CANH và CANL phải khớp trong vòng 5 ns
Các vấn đề về tính toàn vẹn tín hiệu thường gặp:
- Phản xạ từ sự gián đoạn trở kháng
- Điện áp bù mặt đất gây ra sự thay đổi chế độ chung
- Ghép nối điện từ từ các tín hiệu tốc độ cao liền kề
- Độ lệch thông số do nhiệt độ gây ra trong các thành phần thụ động
3. Chiến lược thiết kế bảo vệ ESD và EMC
3.1 Thách thức EMC ô tô
Môi trường điện từ ô tô đặt ra những thách thức nghiêm trọng đối với hệ thống thông tin liên lạc. Phương tiện phải hoạt động đáng tin cậy với sự hiện diện của:
- Sự kiện ESD: Mô hình cơ thể người phóng điện lên đến ±15 kV (ISO 10605)
- Quá độ dẫn điện: Tải xung kết xuất lên đến 100V (ISO 7637-2)
- Phát xạ bức xạ: Điện trường vượt quá 100 V/m (thử nghiệm ALSE theo CISPR 25)
3.2 Các tính năng bảo vệ tích hợp TCAN
Bộ thu phát TI TCAN kết hợp nhiều cơ chế bảo vệ giúp giảm số lượng thành phần bên ngoài đồng thời cải thiện độ tin cậy:
Khả năng bảo vệ tích hợp:
- ±Bảo vệ lỗi 58V: Tồn tại trực tiếp với pin ô tô 24V
- ±Bảo vệ ESD 15 kV: Đáp ứng các yêu cầu ISO 10605 mà không cần các thành phần bên ngoài
- Tắt nhiệt: Bảo vệ tự động ở nhiệt độ tiếp giáp vượt quá 175°C
- Khóa điện áp thấp: Ngăn chặn hoạt động thất thường trong điều kiện mất điện
- Thời gian chờ chiếm ưu thế TXD: Ngăn chặn khóa bus vĩnh viễn do lỗi bộ điều khiển
3.3 Lựa chọn thành phần bảo vệ bên ngoài
Mặc dù các thiết bị TCAN cung cấp khả năng bảo vệ tích hợp mạnh mẽ, nhưng một số ứng dụng nhất định được hưởng lợi từ các thành phần bên ngoài bổ sung:
| Thành phần bảo vệ | Function | Thông số kỹ thuật đề xuất |
|---|---|---|
| Cuộn cảm chế độ chung | Lọc EMI, loại bỏ chế độ chung | 100μH, xếp hạng 2A, cấp ô tô |
| mảng diode TVS | Tạm thời voltage triệt tiêu | 24V standoff, xung đỉnh 500W |
| Điện trở sê-ri | Giới hạn dòng điện, khớp trở kháng | 10-47Ω, 0,25W, xếp hạng xung |
| Tách tụ điện kết thúc | Lọc chế độ chung | 4.7nF, 50V, X7R điện môi |
| Tụ điện lọc | Khử tiếng ồn tần số cao | 100pF-1nF, điện môi C0G/NP0 |
3.4 Nguyên tắc bố trí PCB để tuân thủ EMC
Thử nghiệm chứng minh rằng bố cục PCB phù hợp góp phần đáng kể vào hiệu suất EMC:
- Tụ điện tách rời: Đặt tụ gốm 100nF trong vòng 2mm tính từ chân VCC
- Chiến lược mặt đất: Triển khai mặt đất vững chắc dưới bộ thu phát và đầu nối CAN
- Định tuyến theo dõi: Giữ dấu vết CANH/CANL song song, độ dài phù hợp, tránh xa tín hiệu tốc độ cao
- Vị trí đầu nối: Vị trí đầu nối CAN gần bộ thu phát để giảm thiểu chiều dài sơ khai
- Cân nhắc che chắn: Sử dụng tấm chắn kim loại nối đất cho các đầu nối trong môi trường EMI cao
Xác nhận thiết kế: Dữ liệu thử nghiệm EMC chỉ ra rằng bố cục PCB phù hợp có thể giảm phát xạ bức xạ từ 15-20 dB so với các triển khai được thiết kế kém.
3.5 Cân nhắc kiểm tra EMC cấp hệ thống
OEM ô tô yêu cầu xác nhận EMC toàn diện:
- CISPR 25: Thử nghiệm phát xạ và tiến hành
- ISO 11452: Miễn nhiễm với năng lượng điện từ bức xạ
- ISO 7637-2: Dẫn điện thoáng qua dọc theo đường cung cấp
- ISO 10605: Thử nghiệm phóng tĩnh điện
Các thiết bị TCAN được thiết kế và thử nghiệm để hỗ trợ tuân thủ các tiêu chuẩn này, mặc dù việc triển khai cấp hệ thống cuối cùng quyết định sự thành công của chứng nhận.
3.6 Khắc phục sự cố EMC
Khi thử nghiệm EMC cho thấy lỗi tuân thủ, khắc phục sự cố có hệ thống có thể xác định nguyên nhân gốc rễ:
Các chế độ và giải pháp lỗi phổ biến:
- Phát xạ bức xạ vượt quá giới hạn: Thêm cuộn cảm chế độ chung, cải thiện nối đất hoặc triển khai cáp có vỏ bọc
- Tiếng ồn dẫn trên đường dây điện: Tăng cường lọc với các tụ điện bổ sung hoặc hạt ferit
- Độ nhạy ESD: Xác minh hướng dẫn bố trí PCB, thêm điốt TVS nếu cần
- Lỗi miễn dịch thoáng qua: Kiểm tra xếp hạng và vị trí thành phần bảo vệ
Kỹ thuật chẩn đoán:
- Sử dụng đầu dò trường gần để xác định nguồn bức xạ
- Triển khai đầu dò dòng điện để đo dòng điện chế độ chung
- Sử dụng máy phân tích phổ để mô tả đặc điểm của chữ ký nhiễu
- Tiến hành thử nghiệm phân đoạn để cô lập các khu vực mạch có vấn đề
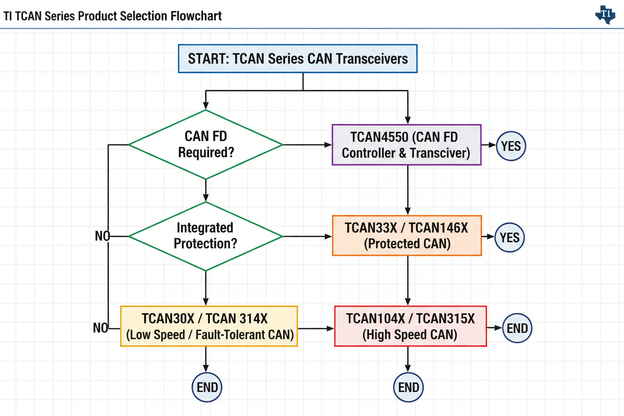
4. Hướng dẫn lựa chọn sản phẩm dòng TCAN
4.1 Khung tiêu chí lựa chọn
Việc lựa chọn bộ thu phát TCAN tối ưu đòi hỏi phải đánh giá có hệ thống các yêu cầu ứng dụng:
Các yếu tố lựa chọn chính:
- Yêu cầu về tốc độ dữ liệu (CAN cổ điển so với CAN FD, cấp tốc độ)
- Dải điện áp hoạt động (hệ thống 5V so với kiến trúc điện áp hỗn hợp)
- Nhu cầu về mức độ bảo vệ (khả năng chịu lỗi tiêu chuẩn so với khả năng chịu lỗi nâng cao)
- Hạn chế tiêu thụ điện năng (chế độ ngủ, đánh thức từ xa)
- Yêu cầu cách ly (hệ thống điện áp cao, tách đất)
4.2 Ma trận so sánh thiết bị
4.3 Thông số kỹ thuật chính theo miền ứng dụng
Hệ thống truyền động và khung gầm:
- Đề xuất TCAN1044-Q1 để hỗ trợ CAN FD lên đến 5 Mbps
- Ưu tiên các thiết bị có bảo vệ chống lỗi ±70V
- Chọn các biến thể có độ trễ vòng lặp thấp cho các ứng dụng quan trọng về thời gian
Hệ thống điện tử và tiện nghi cơ thể:
- TCAN1042-Q1 cung cấp sự cân bằng hiệu suất chi phí tối ưu
- Hỗ trợ mạng một phần cho phép tiết kiệm điện năng đáng kể
- Bảo vệ ±58V tiêu chuẩn đủ cho hầu hết các ứng dụng
Xe điện và ứng dụng điện áp cao:
- TCAN330 cung cấp cách ly điện 5kV
- Tích hợp nguồn điện cách ly giúp đơn giản hóa thiết kế
- Cách ly gia cố đáp ứng các yêu cầu an toàn EV
Ứng dụng cổng và bộ điều khiển miền:
- Nhiều kênh TCAN với điều khiển chế độ riêng lẻ
- Hỗ trợ cả dịch giao thức CAN và CAN FD
- Bảo vệ ESD nâng cao cho các triển khai tiếp xúc với đầu nối
4.4 Phân tích mức tiêu thụ điện năng
Hiệu quả năng lượng là rất quan trọng đối với các thiết kế ô tô hiện đại, đặc biệt là đối với các hệ thống luôn bật:
Giá trị tiêu thụ hiện tại điển hình:
- Chế độ bình thường: 5-10 mA (tùy thuộc vào tốc độ dữ liệu và tải bus)
- Chế độ chờ: 50-100 μA với tính năng phát hiện đánh thức đang hoạt động
- Chế độ ngủ: <10 μA (TCAN1044 khi tắt hoàn toàn)
Chiến lược tối ưu hóa năng lượng:
- Thực hiện đánh thức có chọn lọc để giảm thiểu dòng điện chờ
- Sử dụng mạng một phần để vô hiệu hóa các phân đoạn xe buýt không sử dụng
- Cấu hình các giá trị điện trở đầu cuối thích hợp để giảm tải DC
- Xem xét các thiết bị có bộ điều chỉnh điện áp tích hợp để quản lý điện năng đơn giản
5. Hướng dẫn thực hiện từng bước
5.1 Danh sách kiểm tra thiết kế phần cứng
Thực hiện theo cách tiếp cận có hệ thống này để đảm bảo triển khai TCAN đáng tin cậy:
Bước 1: Xác định yêu cầu
- Yêu cầu về tốc độ dữ liệu tài liệu (CAN cổ điển so với CAN FD)
- Xác định nhu cầu cấp độ bảo vệ dựa trên môi trường ứng dụng
- Xác định ngân sách năng lượng và yêu cầu chế độ ngủ
- Chỉ định các mục tiêu tuân thủ EMC
Bước 2: Lựa chọn thành phần
- Chọn dòng TCAN dựa trên phân tích Bước 1
- Chọn gói phù hợp (SOIC, VSON, SOP tùy theo hạn chế về không gian)
- Chỉ định các thành phần bảo vệ bên ngoài nếu được yêu cầu
- Chọn giá trị điện trở kết thúc (thường là 120Ω)
Bước 3: Thiết kế sơ đồ
- Thực hiện tách rời thích hợp (tụ gốm 100nF trên VCC)
- Kết nối chân STB và EN theo yêu cầu chế độ
- Thêm điện trở nối tiếp tùy chọn để bảo vệ bổ sung
- Bao gồm các điểm kiểm tra để gỡ lỗi và xác thực
Bước 4: Bố cục PCB
- Định vị bộ thu phát gần đầu nối CAN
- Triển khai mặt phẳng nối đất vững chắc dưới thiết bị
- Định tuyến CANH/CANL dưới dạng cặp vi sai với độ dài phù hợp
- Giữ tín hiệu kỹ thuật số tốc độ cao tránh xa dấu vết CAN
Bước 5: Kiểm tra xác thực
- Xác minh tính toàn vẹn của tín hiệu bằng máy hiện sóng (thời gian tăng/giảm, đối xứng)
- Đo độ ổn định điện áp chế độ chung
- Thực hiện kiểm tra tuân thủ trước EMC
- Xác thực các tính năng bảo vệ (kiểm tra khả năng chịu lỗi)
5.2 Cân nhắc tích hợp phần mềm
Cấu hình bộ điều khiển phù hợp đảm bảo hiệu suất TCAN tối ưu:
- Cấu hình thời gian bit: Tính toán phân đoạn lan truyền, phân đoạn pha thích hợp dựa trên đặc tính độ trễ của bộ thu phát
- Điều khiển chế độ: Thực hiện chuyển đổi chế độ chờ/ngủ thích hợp
- Xử lý lỗi: Định cấu hình bộ điều khiển để phản hồi các điều kiện tắt xe buýt
- Giám sát chẩn đoán: Thực hiện theo dõi tỷ lệ lỗi khung hình để bảo trì dự đoán
Tính toán thời gian bit 5.3 cho CAN FD
Cấu hình thời gian bit chính xác là điều cần thiết để giao tiếp đáng tin cậy. Đối với hoạt động CAN FD, các kỹ sư phải tính toán các thông số thời gian cho cả giai đoạn trọng tài và dữ liệu:
Thông số chính:
- Độ trễ lan truyền: Bao gồm độ trễ vòng lặp thu phát (thường là 120-210 ns đối với thiết bị TCAN) và lan truyền cáp (điển hình là 5 ns/m)
- Phân đoạn pha: Phân đoạn Giai đoạn 1 và Phân đoạn Giai đoạn 2 xác định điểm lấy mẫu và khả năng miễn nhiễm tiếng ồn
- Đồng bộ hóa Jump Width: Thường được đặt thành 1-2 lượng tử thời gian để ổn định
Example cấu hình cho pha dữ liệu 5 Mbps:
- Xung nhịp hệ thống: 40 MHz
- Prescaler: 2 (dẫn đến đồng hồ lượng tử thời gian 20 MHz)
- Lượng tử thời gian trên mỗi bit: 20
- Điểm lấy mẫu: 80% (lượng tử lần thứ 16)
- Cấu hình này cung cấp khả năng chống ồn đầy đủ trong khi đáp ứng các yêu cầu về thời gian
Mẹo triển khai: Luôn xác minh các tính toán thời gian bit bằng cách sử dụng các phép đo máy hiện sóng của lưu lượng mạng thực tế, tính đến độ trễ lan truyền trong trường hợp xấu nhất trên tất cả các nút mạng.
6. Kịch bản ứng dụng trong thế giới thực
6.1 Nghiên cứu điển hình ứng dụng 1: Mạng cảm biến ADAS
Thách thức: Nhà cung cấp Cấp 1 yêu cầu mạng băng thông cao kết nối 8 cảm biến radar với ECU nhiệt hạch trung tâm, với yêu cầu độ trễ xác định dưới 2ms.
Giải pháp: Triển khai các thiết bị TCAN1044-Q1 hoạt động ở tốc độ 5 Mbps CAN FD.
Kết quả:
- Độ trễ mạng giảm xuống còn 0,8ms (cải thiện 60% so với CAN cổ điển)
- Tải xe buýt duy trì dưới 35% mặc dù khối lượng dữ liệu lớn
- Tuân thủ EMC mà không cần lọc bên ngoài bổ sung
Thông tin chi tiết về kỹ thuật: "Các tính năng bảo vệ tích hợp của TCAN1044 đã loại bỏ sự cần thiết của điốt TVS bên ngoài, giảm chi phí BOM 0,45 đô la cho mỗi nút." — Kỹ sư phần cứng cao cấp, Ô tô Cấp 1
6.2 Nghiên cứu điển hình ứng dụng 2: Hệ thống quản lý pin xe điện
Thách thức: BMS yêu cầu giao tiếp cách ly giữa bộ pin điện áp cao (400V) và mạng xe điện áp thấp, với các yêu cầu an toàn được xếp hạng SIL.
Giải pháp: TCAN330 bộ thu phát CAN cách ly với lớp cách điện gia cố.
Kết quả:
- Định mức cách ly 5kV đáp ứng các yêu cầu an toàn chức năng
- Bộ chuyển đổi DC-DC tích hợp thiết kế cung cấp điện đơn giản
- Miễn nhiễm thoáng qua chế độ chung vượt quá 50 kV / μs
6.3 Nghiên cứu điển hình ứng dụng 3: Cổng mô-đun điều khiển cơ thể
Thách thức: Mô-đun Gateway cần thiết để kết nối 4 bus CAN (hỗn hợp CAN cổ điển và CAN FD) trong khi vẫn duy trì dòng điện ngủ thấp.
Giải pháp: Nhiều thiết bị TCAN1042 với chức năng đánh thức có chọn lọc.
Kết quả:
- Đạt được dòng điện ngủ dưới 50μA
- Kết nối mạng một phần cho phép đánh thức ECU có chọn lọc
- Khả năng tương thích ngược đảm bảo tích hợp hệ thống cũ liền mạch
6.4 Nghiên cứu điển hình ứng dụng 4: Viễn thông đội xe thương mại
Thách thức: Hệ thống quản lý đội xe yêu cầu giao tiếp đáng tin cậy qua các đoạn cáp kéo dài (lên đến 40 mét) trong xe tải hạng nặng có môi trường điện từ khắc nghiệt.
Giải pháp: TCAN1051 thiết bị hoạt động ở tốc độ 250 kbps Classical CAN với khả năng bảo vệ bên ngoài nâng cao.
Kết quả:
- Giao tiếp đáng tin cậy đạt được chiều dài xe buýt trên 40 mét
- Cuộn cảm chế độ chung bên ngoài làm giảm EMI 25 dB
- Hệ thống đã vượt qua các yêu cầu về khí thải CISPR 25 Class 5
- Triển khai thực địa vượt quá 500.000 giờ xe mà không có lỗi liên lạc
Phân tích dữ liệu hiện trường: Giám sát lâu dài các hệ thống đã triển khai cho thấy các thiết bị TCAN duy trì hiệu suất nhất quán trong các nhiệt độ khắc nghiệt từ -40°C đến +125°C, xác nhận kiểm tra chất lượng ô tô.
7. Những câu hỏi thường gặp
Chiều dài cáp tối đa cho CAN FD ở tốc độ 5 Mbps là bao nhiêu?
Ở tốc độ dữ liệu 5 Mbps, chiều dài bus tối đa được khuyến nghị là khoảng 20 mét với đầu cuối thích hợp và kết nối sơ khai tối thiểu. Đối với khoảng cách xa hơn, tốc độ dữ liệu phải được giảm theo thông số kỹ thuật thời gian CAN FD. Thử nghiệm chỉ ra rằng tính toàn vẹn của tín hiệu giảm đáng kể vượt quá 25 mét ở tốc độ 5 Mbps.
Bộ thu phát TCAN có thể hoạt động với bộ vi điều khiển 3.3V không?
Hầu hết các thiết bị TCAN đều yêu cầu nguồn cung cấp VCC 5V để tạo mức bus CAN thích hợp. Tuy nhiên, các chân I/O logic (TXD, RXD, STB, EN) thường có khả năng chịu 3.3V-5V, cho phép kết nối trực tiếp với MCU 3.3V mà không cần dịch mức. Luôn tham khảo bảng dữ liệu thiết bị cụ thể để biết khả năng tương thích ở mức logic.
Kết nối mạng một phần hoạt động như thế nào với các thiết bị TCAN?
Kết nối mạng một phần (ISO 11898-6) cho phép đánh thức có chọn lọc các ECU cụ thể mà không cần kích hoạt toàn bộ mạng. TCAN1042 và TCAN1044 hỗ trợ điều này thông qua tính năng phát hiện mẫu đánh thức chuyên dụng trên bus CAN trong khi vẫn duy trì mức tiêu thụ dòng điện cực thấp (thường là <50μA). Tính năng này rất cần thiết để đáp ứng ngân sách hiện tại về giấc ngủ của xe hiện đại.
Mức độ bảo vệ nào là đủ cho các ứng dụng ô tô điển hình?
Đối với hầu hết các ứng dụng trong xe, các thiết bị TCAN có bảo vệ lỗi ±58V và định mức ESD ±15kV cung cấp khả năng bảo vệ đầy đủ. Tuy nhiên, các ứng dụng tiếp xúc với quá độ nghiêm trọng (quản lý pin, kết nối máy phát điện) có thể được hưởng lợi từ khả năng bảo vệ nâng cao (±70V) hoặc điốt TVS bên ngoài.
Tôi có thể kết hợp các thiết bị CAN cổ điển và CAN FD trên cùng một xe buýt không?
Có, CAN FD tương thích ngược với CAN cổ điển. Khi một nút CAN cổ điển nhận được khung CAN FD, nó sẽ diễn giải nó là lỗi định dạng và không thừa nhận. Đối với mạng hỗn hợp, hãy đảm bảo các nút CAN cổ điển sử dụng bộ thu phát xử lý đúng khung CAN FD mà không tạo ra khung lỗi có thể làm gián đoạn giao tiếp.
8. Kết luận và các bước tiếp theo
Tóm tắt thông tin chi tiết chính
Phân tích toàn diện về bộ thu phát TI TCAN này tiết lộ một số cân nhắc quan trọng đối với thiết kế giao tiếp CAN ô tô:
- Việc áp dụng CAN FD đang tăng tốc: Với khả năng 5 Mbps và hiệu quả giao thức được cải thiện, CAN FD cho phép các ứng dụng ô tô thế hệ tiếp theo trong khi vẫn duy trì khả năng tương thích ngược
- Bảo vệ tích hợp giúp giảm chi phí hệ thống: Các thiết bị TCAN có khả năng chịu lỗi ±58V tích hợp và bảo vệ ESD ±15kV có thể loại bỏ các thành phần bảo vệ bên ngoài trong nhiều ứng dụng
- Sự phát triển của kiến trúc thúc đẩy các yêu cầu: Việc chuyển đổi sang kiến trúc miền và kiến trúc vùng đặt ra những yêu cầu mới về hiệu suất, cách ly và quản lý năng lượng của bộ thu phát
- Tuân thủ EMC yêu cầu tập trung ở cấp độ hệ thống: Mặc dù các thiết bị TCAN cung cấp khả năng bảo vệ cơ bản tuyệt vời, nhưng bố cục PCB phù hợp và lọc bên ngoài vẫn cần thiết để chứng nhận
Khuyến nghị triển khai
Dựa trên phân tích dữ liệu và các phương pháp hay nhất trong ngành, chúng tôi đề xuất cách tiếp cận sau:
- Đánh giá các yêu cầu về tốc độ dữ liệu một cách cẩn thận—triển khai CAN FD cho các thiết kế mới để đảm bảo khả năng tương thích trong tương lai
- Chọn mức độ bảo vệ dựa trên môi trường ứng dụng thay vì mặc định ở thông số kỹ thuật tối đa
- Xác nhận hiệu suất EMC sớm trong chu kỳ thiết kế thông qua thử nghiệm trước khi tuân thủ
- Xem xét các yêu cầu cách ly đối với các ứng dụng điện áp cao—TCAN330 đơn giản hóa thiết kế hệ thống EV
Các bước tiếp theo cho dự án của bạn
Để tiếp tục triển khai bộ thu phát TI TCAN của bạn:
- Tải xuống bảng dữ liệu cho TCAN1042, TCAN1044 và TCAN330 từ TI.com để biết thông số kỹ thuật chi tiết
- Yêu cầu mô-đun đánh giá để xác thực hiệu suất trong môi trường ứng dụng cụ thể của bạn
- Xem lại ghi chú ứng dụng SLLA337 (Lớp vật lý CAN) và SLLA418 (Thiết kế hệ thống CAN FD) để được hướng dẫn thiết kế bổ sung
- Sử dụng các công cụ thiết kế WEBENCH của TI để lựa chọn và mô phỏng thành phần
Bạn đã sẵn sàng tối ưu hóa thiết kế truyền thông ô tô của mình chưa? Bắt đầu bằng cách đánh giá tốc độ dữ liệu và các yêu cầu bảo vệ của bạn dựa trên các thông số kỹ thuật danh mục TCAN được nêu trong hướng dẫn này.
Bài viết liên quan:
- Hiểu về việc kết thúc xe buýt CAN: Các phương pháp hay nhất cho mạng ô tô
- Hướng dẫn thiết kế EMC cho hệ thống thông tin liên lạc ô tô
- Chuyển đổi từ CAN cổ điển sang CAN FD: Chiến lược di chuyển
Tài nguyên kỹ thuật:
- Bảng dữ liệu TCAN1042-Q1 (SLLSEU3)
- Bảng dữ liệu TCAN1044-Q1 (SLLSFU0)
- TCAN330 Tham khảo kỹ thuật bộ thu phát CAN cách ly (SLLSEX8)
- Hướng dẫn lựa chọn giải pháp giao diện ô tô TI