

Hướng dẫn lựa chọn công nghệ MEMS: Chọn hệ thống vi cơ điện phù hợp cho ứng dụng của bạn
Đối tượng mục tiêu: Kỹ sư điện tử, trưởng nhóm R&D, nhà thiết kế sản phẩm, quản lý mua sắm và người ra quyết định kỹ thuật làm việc với tích hợp cảm biến, thiết bị IoT, hệ thống ô tô và điện tử tiêu dùng.
Mục lục
- [Giới thiệu: Hiểu MEMS trong công nghệ bán dẫn hiện đại] (# 1-giới thiệu-hiểu-mems-trong-công nghệ-bán dẫn hiện đại)
- [Các thông số kỹ thuật chính của thiết bị MEMS] (# 2-key-technical-parameters-of-mems-devices)
- [Các loại MEMS và lựa chọn ứng dụng cụ thể] (# 3-mems-types-and-application-specific-selection)
- [So sánh hiệu suất: MEMS và cảm biến truyền thống] (# 4-so sánh hiệu suất-mems-vs-cảm biến truyền thống)
- [Cân nhắc thiết kế và cạm bẫy triển khai phổ biến] (# 5-cân nhắc thiết kế và cạm bẫy triển khai phổ biến)
- [Cân nhắc về chuỗi cung ứng và tìm nguồn cung ứng] (# 6-Cân nhắc về chuỗi cung ứng và tìm nguồn cung ứng)
- [Câu hỏi thường gặp] (# 7-Câu hỏi thường gặp)
- [Kết luận và các bước tiếp theo] (# 8-kết luận và các bước tiếp theo)
1. Giới thiệu: Hiểu về MEMS trong công nghệ bán dẫn hiện đại
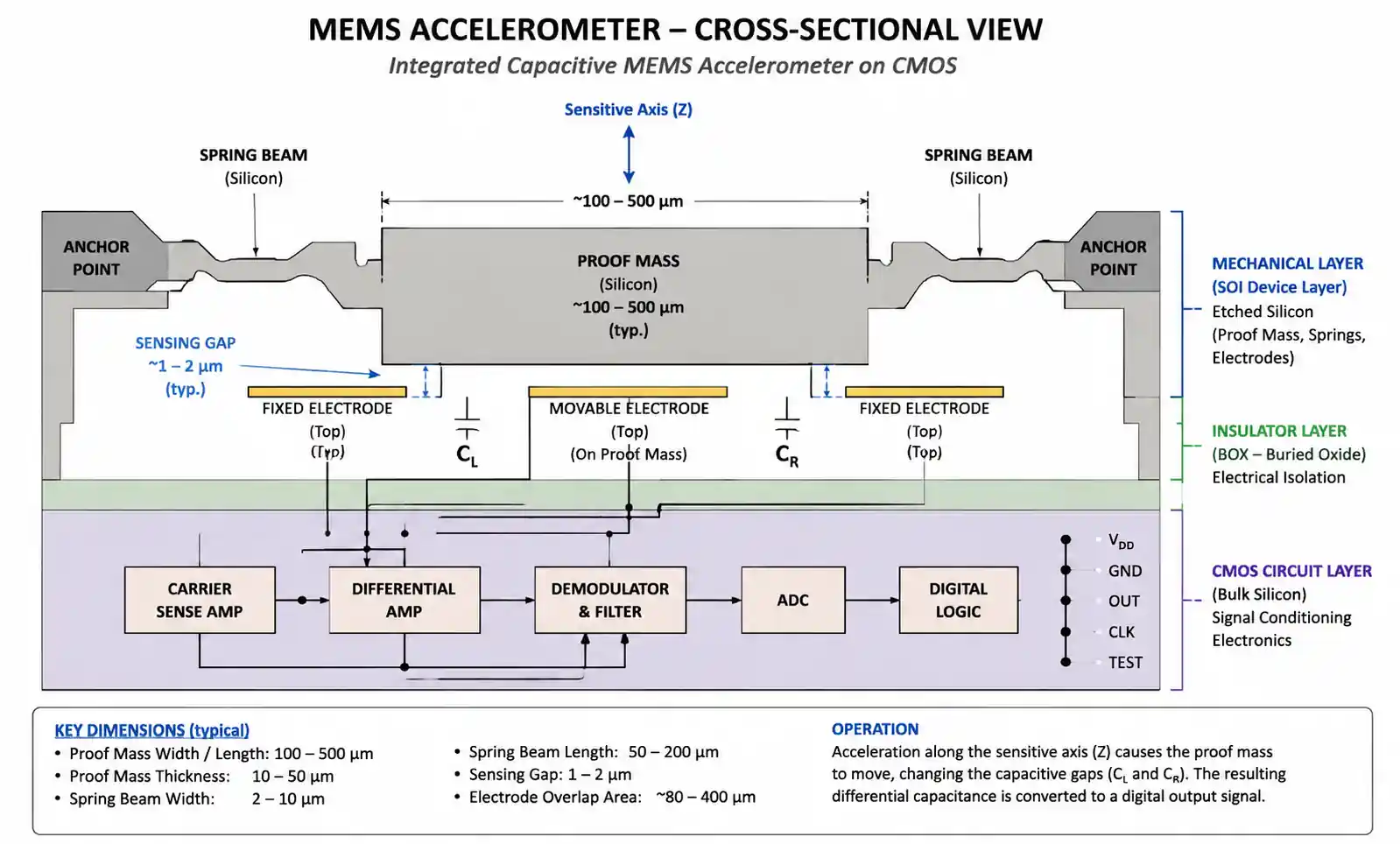
Hệ thống vi cơ điện tử (MEMS) đại diện cho sự giao thoa quan trọng giữa kỹ thuật cơ khí và công nghệ bán dẫn, tích hợp các cấu trúc cơ khí cực nhỏ với các mạch điện tử trên một chất nền silicon duy nhất. Không giống như các cảm biến rời rạc truyền thống, các thiết bị MEMS tận dụng các quy trình chế tạo chất bán dẫn — bao gồm gia công vi mô bề mặt, gia công vi mô hàng loạt và liên kết wafer — để tạo ra các cảm biến và bộ truyền động thu nhỏ với tỷ lệ hiệu suất trên kích thước chưa từng có.
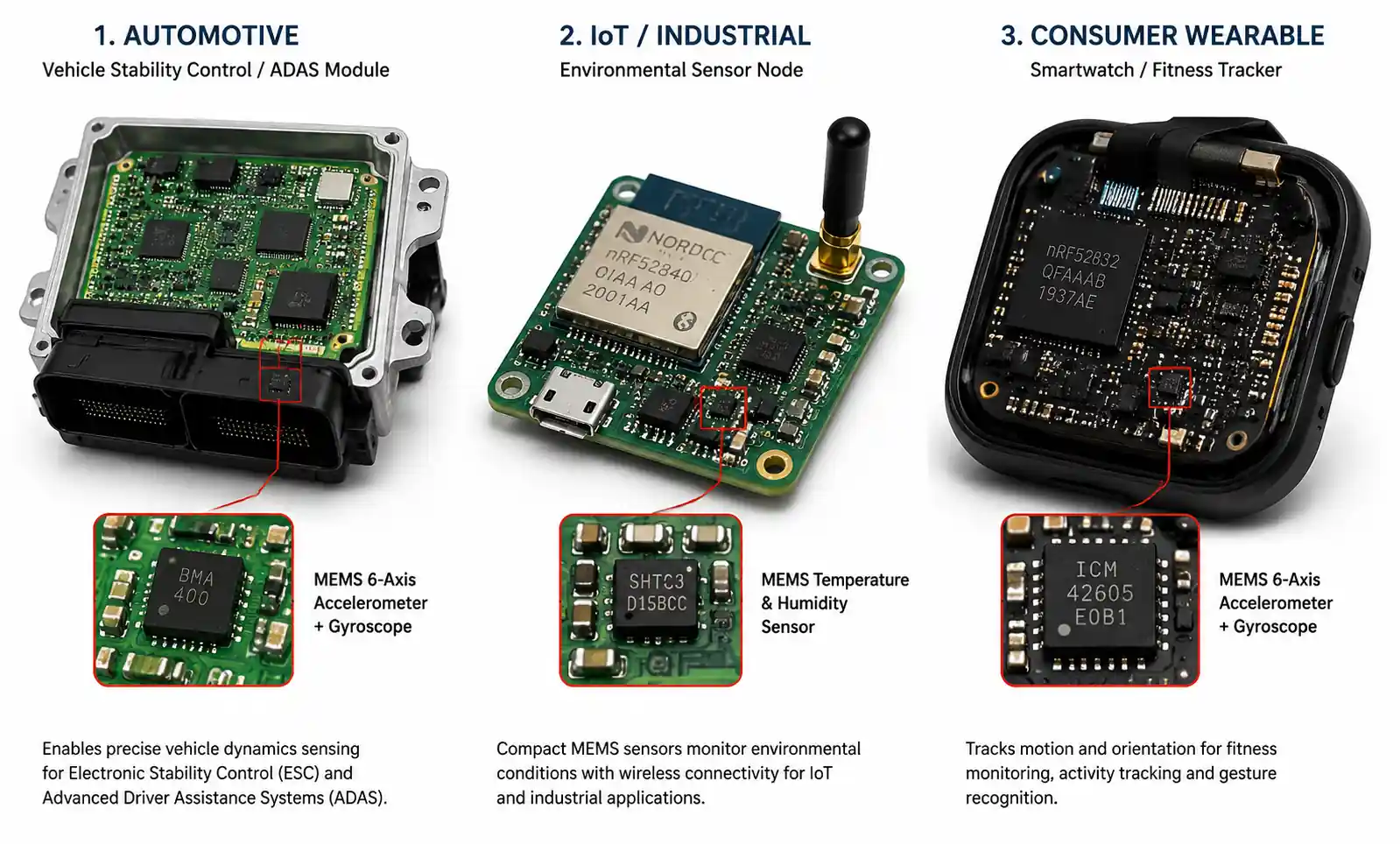
Thị trường MEMS toàn cầu đã phát triển đáng kể trên các ứng dụng ô tô, công nghiệp, điện tử tiêu dùng và y tế. Các kỹ sư phải đối mặt với áp lực ngày càng tăng trong việc lựa chọn các thành phần MEMS cân bằng giữa độ nhạy, mức tiêu thụ điện năng, kích thước gói và chi phí đồng thời đáp ứng các yêu cầu nghiêm ngặt về độ tin cậy. Hướng dẫn này cung cấp các tiêu chí lựa chọn thực tế dựa trên các ràng buộc thiết kế trong thế giới thực và giúp bạn tránh hiểu sai thông số kỹ thuật phổ biến có thể dẫn đến việc thiết kế lại tốn kém.
Cho dù bạn đang thiết kế một nút cảm biến IoT yêu cầu mức tiêu thụ điện năng cực thấp, hệ thống an toàn ô tô yêu cầu chứng nhận AEC-Q hay thiết bị đeo dành cho người tiêu dùng ưu tiên bao bì nhỏ gọn, thì việc hiểu được sự cân bằng giữa các công nghệ MEMS khác nhau là điều cần thiết để lựa chọn linh kiện tối ưu.
2. Các thông số kỹ thuật chính của thiết bị MEMS
Khi đánh giá các thành phần MEMS cho thiết kế của bạn, một số thông số kỹ thuật ảnh hưởng trực tiếp đến hiệu suất của hệ thống. Hiểu các thông số kỹ thuật này và ý nghĩa kỹ thuật của chúng là rất quan trọng để lựa chọn phù hợp.
2.1 Độ nhạy và phạm vi đo
Độ nhạy MEMS xác định sự thay đổi tín hiệu đầu ra trên một đơn vị đại lượng vật lý đo được. Đối với gia tốc kế, điều này thường được biểu thị bằng mV / g hoặc LSB / g cho đầu ra kỹ thuật số. Độ nhạy cao hơn cải thiện tỷ lệ tín hiệu trên nhiễu nhưng thường làm giảm phạm vi đo. Một lỗi thiết kế phổ biến là chọn độ nhạy tối đa mà không xem xét phạm vi gia tốc dự kiến trong ứng dụng của bạn — điều này có thể dẫn đến bão hòa cảm biến trong quá trình hoạt động bình thường.
Đối với cảm biến áp suất, độ nhạy được biểu thị bằng mV/kPa hoặc mV/V/kPa, với dải đầu ra toàn thang đo thường từ 10 mV đến 100 mV đối với cảm biến tương tự. Khi chọn MEMS áp suất cho các ứng dụng y tế hoặc công nghiệp, hãy xác minh rằng thông số kỹ thuật độ nhạy phù hợp với yêu cầu độ phân giải ADC của bạn và tính đến độ trôi do nhiệt độ gây ra.
2.2 Chế độ tiêu thụ điện năng và hoạt động
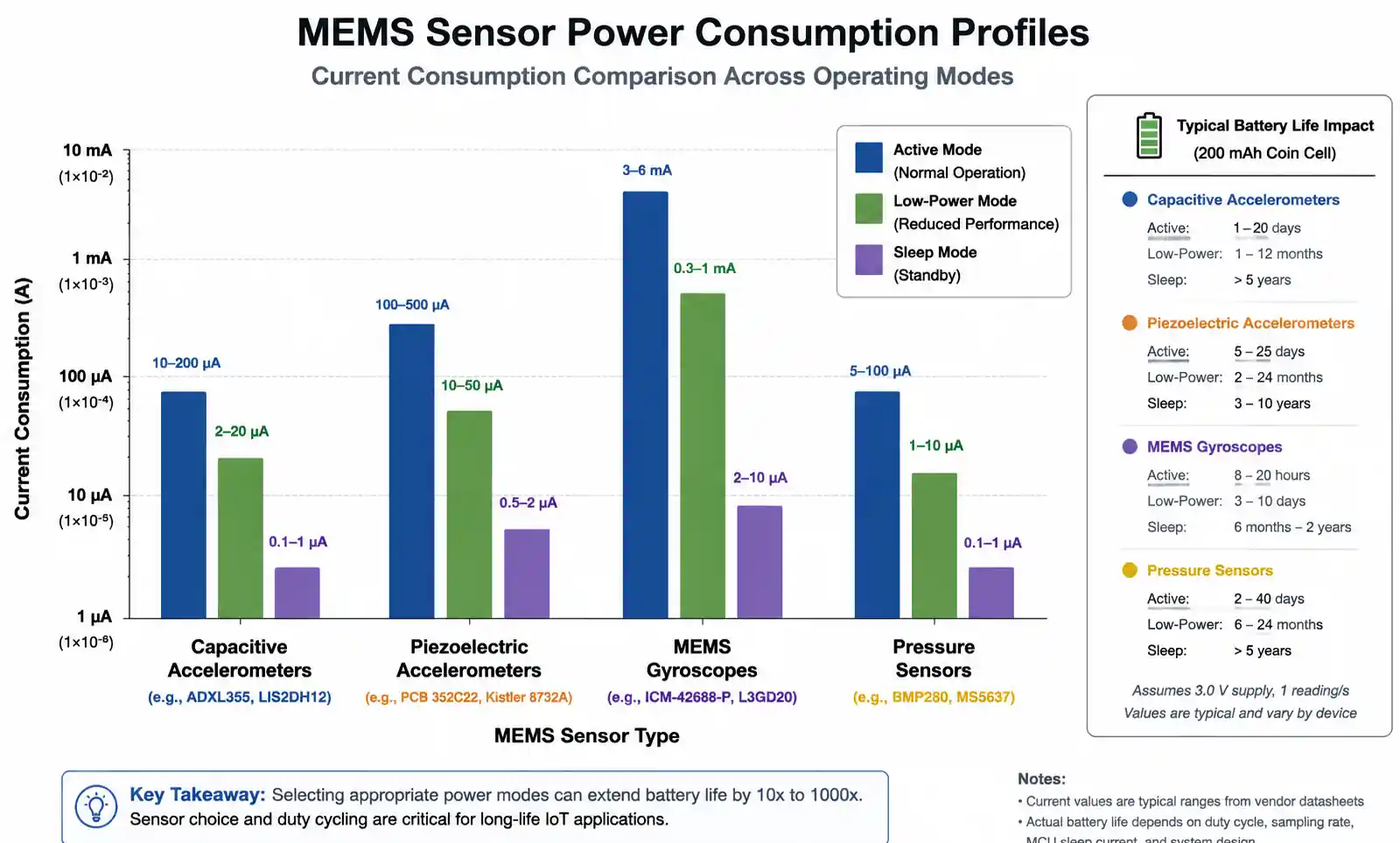
Mức tiêu thụ điện năng của MEMS thay đổi đáng kể dựa trên kiến trúc thiết bị và chế độ hoạt động. Gia tốc kế MEMS điện dung thường tiêu thụ 10–200 μA ở chế độ liên tục, trong khi thiết kế áp điện có thể yêu cầu 100–500 μA. Đối với các ứng dụng IoT chạy bằng pin, hãy chú ý đến dòng điện ở chế độ ngủ (thường là 1–5 μA) và thời gian đánh thức, vì hoạt động theo chu kỳ nhiệm vụ ảnh hưởng đáng kể đến tổng công suất hệ thống.
Con quay hồi chuyển thường tiêu thụ nhiều điện năng hơn gia tốc kế do chúng cần dao động cơ học liên tục. Một con quay hồi chuyển MEMS điển hình tiêu thụ 3–6 mA trong quá trình đo hoạt động, làm cho kiến trúc quản lý năng lượng trở nên quan trọng trong các thiết bị di động. Hãy xem xét MEMS với quản lý năng lượng tích hợp hoặc chế độ năng lượng thấp có thể được đồng bộ hóa với chu kỳ ngủ MCU của bạn.
2.3 Mật độ và độ phân giải tiếng ồn
Mật độ nhiễu, được đo bằng μg / √ Hz đối với gia tốc kế hoặc ° / s / √Hz đối với con quay hồi chuyển, xác định tín hiệu tối thiểu có thể phát hiện được. Mật độ tiếng ồn thấp hơn cho phép đo độ phân giải cao hơn nhưng có thể phải trả giá bằng việc tăng mức tiêu thụ điện năng hoặc kích thước khuôn lớn hơn. Đối với các ứng dụng có độ chính xác cao như điều hướng quán tính hoặc giám sát địa chấn, mật độ tiếng ồn dưới 25 μg/√Hz thường được yêu cầu.
Mối quan hệ giữa mật độ nhiễu và băng thông là rất quan trọng—thu hẹp băng thông đo của bạn thông qua lọc kỹ thuật số có thể cải thiện độ phân giải hiệu quả. Tuy nhiên, hãy đảm bảo thiết kế bộ lọc của bạn không gây ra độ trễ pha quá mức nếu phản hồi thời gian thực là quan trọng đối với vòng điều khiển hoặc chức năng an toàn của bạn.
3. Các loại MEMS và lựa chọn ứng dụng cụ thể
Các công nghệ cảm biến MEMS khác nhau mang lại những lợi thế riêng biệt tùy thuộc vào yêu cầu ứng dụng của bạn. Phần này cung cấp hướng dẫn lựa chọn dựa trên các tình huống thiết kế phổ biến.
3.1 Gia tốc kế MEMS
| Tham số | MEMS điện dung | MEMS áp điện | MEMS áp điện |
|---|---|---|---|
| Phạm vi đo lường | ±2g đến ±16g (tiêu dùng) ±50g đến ±200g (ô tô) |
±50g đến ±500g | ±2g đến ±250g |
| Đáp ứng tần số | DC đến 1 kHz | 1 Hz đến 10 kHz + | DC đến 5 kHz |
| Công suất tiêu thụ | 10–200 μA | 100–500 μA | 50–300 μA |
| Ổn định nhiệt độ | Xuất sắc | Tốt (yêu cầu bồi thường) | Trung bình (độ trôi cao) |
| Ứng dụng tốt nhất | Cảm biến độ nghiêng, phát hiện chuyển động, thiết bị tiêu dùng | Giám sát rung, phát hiện sốc, cảm biến va chạm | Môi trường khắc nghiệt, ứng dụng có độ ẩm cao |
| Phạm vi chi phí điển hình | $ 0.50–$ 3.00 | $ 2.00–$ 8.00 | $ 3.00–$ 12.00 |
Gia tốc kế MEMS điện dung thống trị các ứng dụng tiêu dùng và di động do phản hồi DC tuyệt vời, tiêu thụ điện năng thấp và tiết kiệm chi phí. Chúng đo gia tốc bằng cách phát hiện sự thay đổi điện dung trong khối lượng bằng chứng được gia công vi mô lơ lửng bởi cấu trúc lò xo. Để phát hiện hướng điện thoại thông minh hoặc theo dõi thể dục, gia tốc kế điện dung với phạm vi ±2g đến ±8g và độ phân giải 12–16 bit thường là tối ưu.
MEMS áp điện vượt trội trong các ứng dụng giám sát rung động tần số cao như bảo trì dự đoán trong thiết bị công nghiệp hoặc phát hiện tiếng gõ ô tô. Không có khả năng đo tín hiệu DC (bản chất chúng được ghép nối AC) khiến chúng không phù hợp để cảm biến độ nghiêng nhưng lý tưởng cho phân tích rung động trong đó các tần số trên 1 Hz được quan tâm.
3.2 Con quay hồi chuyển MEMS
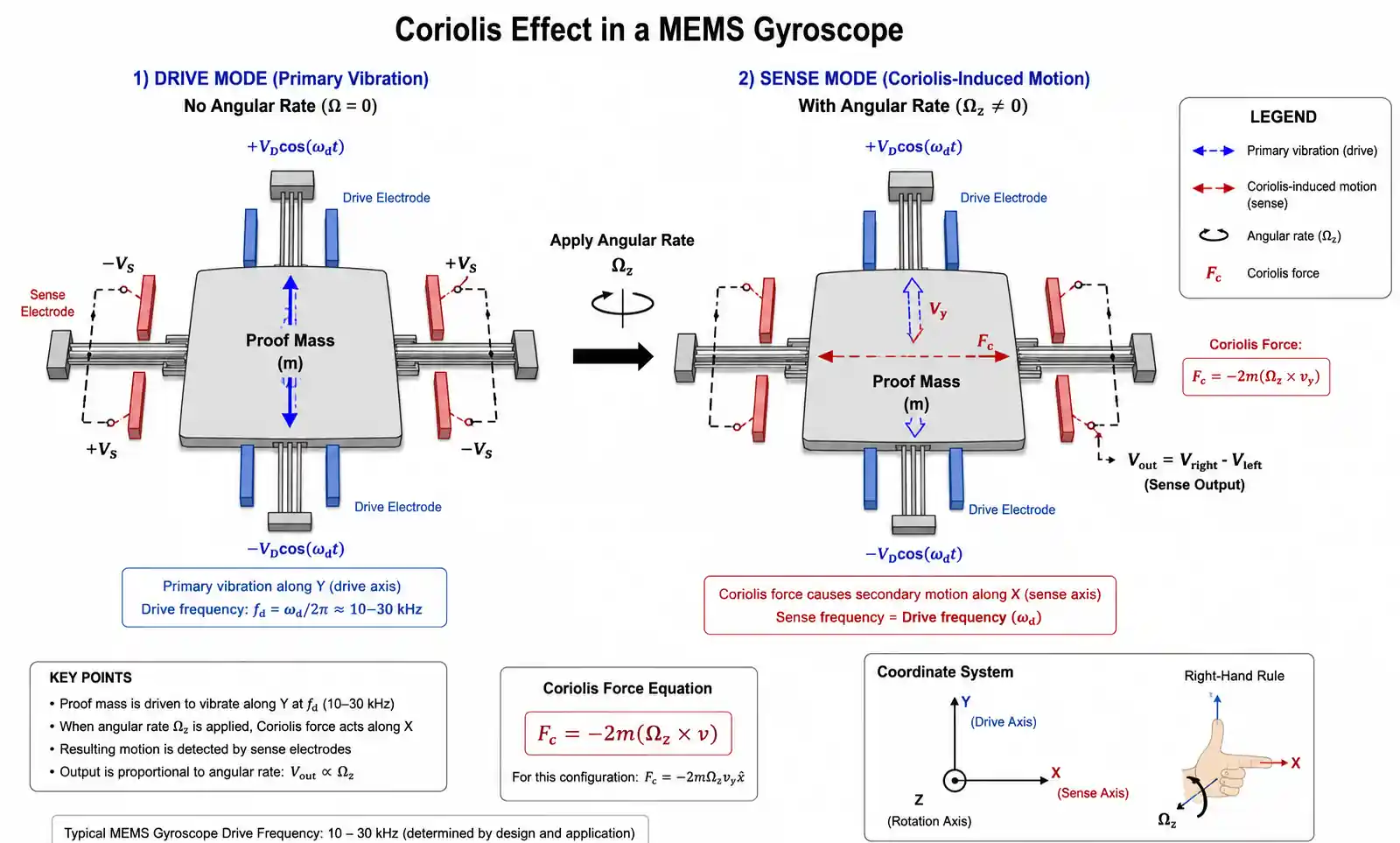
Con quay hồi chuyển MEMS đo vận tốc góc bằng cách sử dụng hiệu ứng Coriolis trên các cấu trúc vi mô rung động. Việc lựa chọn phụ thuộc chủ yếu vào độ chính xác yêu cầu của bạn, thông số kỹ thuật trôi và ngân sách năng lượng.
| Loại ứng dụng | Yêu cầu phạm vi | Cần ổn định thiên vị | Kiến trúc đề xuất |
|---|---|---|---|
| Điện tử tiêu dùng (chơi game, AR/VR) | ±250 đến ±2000 ° / s | 10–50 ° / giờ | Cấp tiêu dùng một trục hoặc 3 trục |
| Ổn định máy bay không người lái | ±500 đến ±2000 ° / s | 5–20 ° / giờ | 3 trục cấp ô tô với phản hồi nhanh |
| Ô tô (ESC, ADAS) | ±300 ° / giây | <10 ° / h, đạt tiêu chuẩn AEC-Q100 | Cấp ô tô với tính năng tự kiểm tra |
| Robot công nghiệp | ±100 đến ±500 ° / s | 1–5 ° / giờ | Cấp chiến thuật hiệu suất cao |
| Điều hướng quán tính | ±100 ° / giây | <0,1 ° / giờ | Cấp chiến thuật hoặc điều hướng (đắt tiền) |
Độ ổn định phân cực (còn được gọi là độ ổn định phân cực trong chạy) thường bị hiểu lầm nhưng cực kỳ quan trọng đối với bất kỳ ứng dụng nào yêu cầu ước tính góc thông qua tích hợp. Một con quay hồi chuyển có độ ổn định phân cực 10 ° / h sẽ tích lũy 10 độ sai số mỗi giờ ngay cả khi đứng yên — độ lệch này phải được bù đắp thông qua hợp nhất cảm biến với gia tốc kế hoặc từ kế.
3.3 Cảm biến áp suất MEMS
Cảm biến áp suất MEMS sử dụng các phần tử cảm biến áp điện hoặc điện dung trên màng silicon. Các yếu tố lựa chọn chính bao gồm phạm vi áp suất, khả năng tương thích với phương tiện và loại bao bì (áp suất tuyệt đối, đồng hồ đo hoặc chênh lệch).
Đối với cảm biến áp suất tuyệt đối ống góp ô tô (MAP), thông số kỹ thuật điển hình là phạm vi đo 20–250 kPa với độ chính xác ±1% trên -40°C đến 125°C. Theo dõi huyết áp y tế yêu cầu độ chính xác cao hơn (±0,5%) và chứng nhận tương thích sinh học. Kiểm soát quy trình công nghiệp thường yêu cầu cách ly phương tiện bằng thép không gỉ và đầu ra vòng lặp dòng điện 4–20 mA.
Khi chọn cảm biến áp suất MEMS, hãy xác minh rằng độ chính xác được chỉ định bao gồm các hiệu ứng nhiệt độ trong phạm vi hoạt động của bạn — nhiều bảng dữ liệu liệt kê độ chính xác nhiệt độ phòng riêng biệt với hệ số bù nhiệt độ (TCO) và hệ số độ nhạy nhiệt độ (TCS), phải được kết hợp để phân tích tổng ngân sách lỗi.
4. So sánh hiệu suất: MEMS và cảm biến truyền thống
Hiểu được khi nào công nghệ MEMS mang lại lợi thế rõ ràng so với các phương pháp cảm biến thông thường giúp tối ưu hóa cả hiệu suất và chi phí.
| Loại cảm biến | Lợi thế MEMS | Ưu điểm cảm biến truyền thống | Điểm giao nhau |
|---|---|---|---|
| Gia tốc kế | Kích thước, công suất, chi phí, tích hợp | Khả năng g cao (>500g), tần số cực thấp (<0,01 Hz) | Các phép đo trên ±200g hoặc DC |
| Con quay hồi chuyển | Quy mô, chi phí, khởi động nhanh | Độ chính xác cực cao (cấp điều hướng), độ trôi rất thấp | Độ ổn định phân cực <Yêu cầu 0,1°/h |
| Micrô | Đáp ứng tần số phẳng, công suất thấp, bao bì SMD | Mức áp suất âm thanh cao (>130 dB SPL) | Ghi âm chuyên nghiệp |
| Bộ dao động | Chống sốc, công suất thấp, khả năng lập trình | Tiếng ồn pha cực thấp, ổn định nhiệt độ cực cao | Các ứng dụng viễn thông/RF yêu cầu nhiễu pha -140 dBc/Hz |
Các thiết bị MEMS đạt được kích thước giảm đáng kể thông qua chế tạo hàng loạt bán dẫn—gia tốc kế MEMS chiếm ít hơn 4 mm² so với 100+ mm² đối với gia tốc kế áp điện thông thường. Lợi thế tích hợp này cho phép các ứng dụng như tai nghe không dây thực sự, trong đó hạn chế về không gian khiến các cảm biến truyền thống trở nên không thực tế.
Tuy nhiên, cảm biến MEMS thường không thể sánh được với hiệu suất tối ưu của các cảm biến rời rạc, lớn hơn trong điều kiện khắc nghiệt. Cảm biến địa chấn cao cấp vẫn dựa vào gia tốc kế cân bằng lực và con quay hồi chuyển sợi quang vẫn vượt trội cho các ứng dụng điều hướng yêu cầu độ ổn định <0,01 ° / h. Điểm quyết định phụ thuộc vào việc liệu các yêu cầu về hiệu suất của ứng dụng của bạn có nằm trong khả năng MEMS hay không, vốn đã liên tục được cải thiện trong khi chi phí giảm.
5. Cân nhắc thiết kế và những cạm bẫy triển khai phổ biến
Tích hợp MEMS thành công đòi hỏi sự chú ý đến bố cục PCB, thiết kế nguồn điện và hiểu đúng về hệ tọa độ cảm biến và giao diện đầu ra.
5.1 Bố cục PCB và lắp cơ khí
Cảm biến MEMS chứa các cấu trúc cơ học cực nhỏ có thể bị ảnh hưởng bởi ứng suất PCB và khớp nối rung. Gắn gia tốc kế và con quay hồi chuyển MEMS cách xa các cạnh bo mạch và lỗ lắp, tốt nhất là gần trục trung tính cơ học của bo mạch. Tránh đặt chúng gần các thành phần lớn có thể tạo ra gradient nhiệt.
Để có độ chính xác cao nhất, hãy giảm thiểu khoảng cách giữa thiết bị MEMS và điểm tham chiếu lắp. Trong các ứng dụng đo chuyển động quay, mỗi milimet độ lệch tạo ra gia tốc tiếp tuyến làm ô nhiễm phép đo con quay hồi chuyển của bạn. Ghi lại vị trí cảm biến chính xác để các kỹ sư cơ khí của bạn tính toán chính xác các phép biến đổi tọa độ.
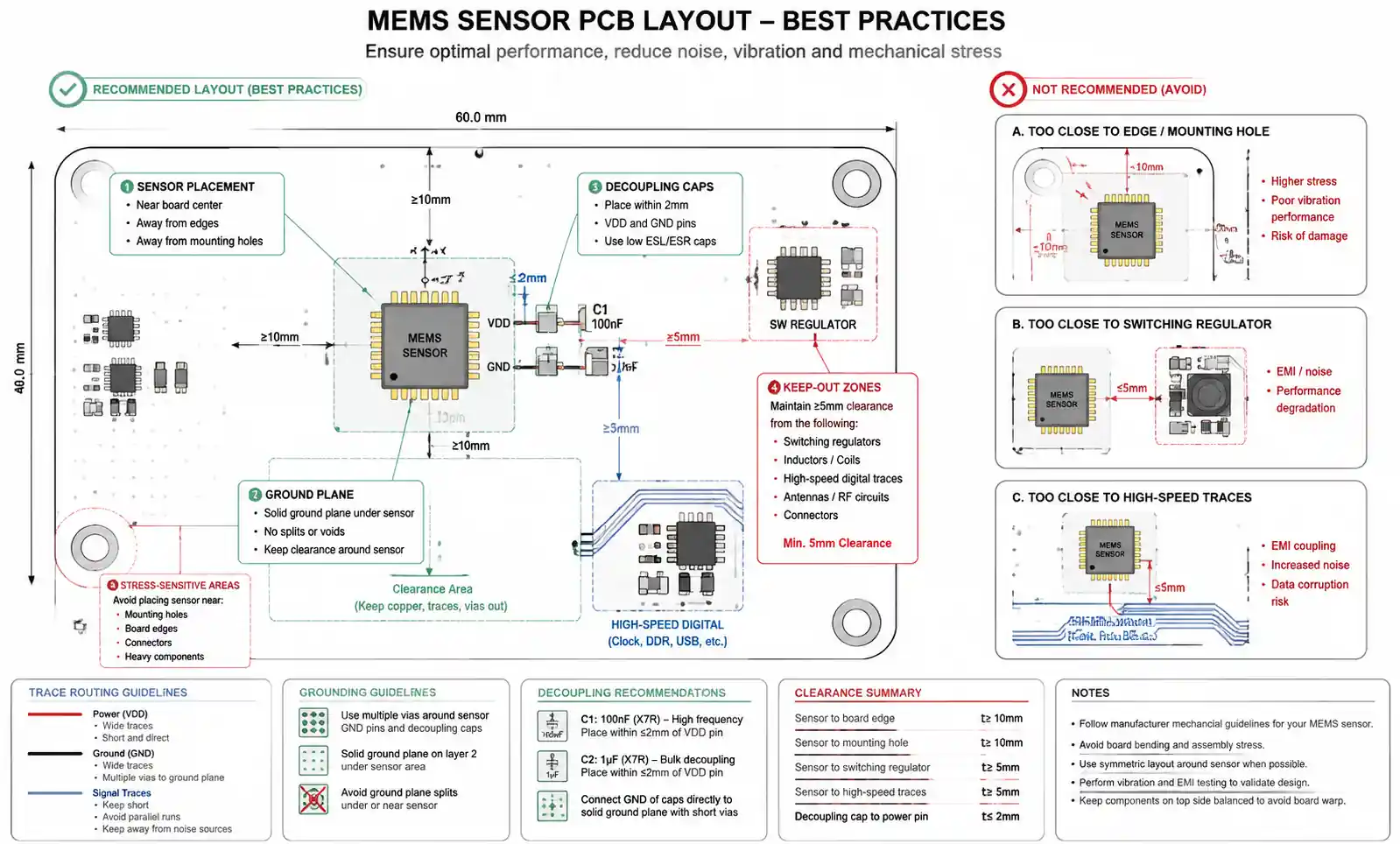
Một sai lầm nghiêm trọng là định tuyến tín hiệu kỹ thuật số tốc độ cao hoặc chuyển đổi nguồn điện gần đầu ra tương tự MEMS. Ngay cả với các giao diện vi sai, nhiễu điện từ có thể ghép vào các cấu trúc khối lượng bằng chứng nhạy cảm. Sử dụng mặt đất và duy trì khoảng cách ít nhất 5 mm với các nguồn tiếng ồn. Đối với giao diện kỹ thuật số SPI hoặc I²C, đầu cuối thích hợp và tụ điện bỏ qua theo thông số kỹ thuật của bảng dữ liệu là điều cần thiết để ngăn ngừa lỗi giao tiếp.
5.2 Lọc và tách nguồn điện
Các thiết bị MEMS yêu cầu nguồn điện sạch, ổn định — thường là 1.8V đến 3.3V với gợn sóng <50 mV. Đặt các tụ điện tách rời càng gần chân VDDIO và VDD càng tốt, sử dụng kết hợp gốm 100 nF (X7R hoặc X5R) và tụ điện số lượng lớn 10 μF. Tụ điện gốm phải cách chân nguồn trong vòng 2 mm để triệt tiêu nhiễu tần số cao một cách hiệu quả.
Một số gia tốc kế và con quay hồi chuyển MEMS bao gồm bộ điều chỉnh điện áp bên trong, nhưng nhiễu nguồn cung cấp bên ngoài vẫn có thể ghép nối thông qua các hiệu ứng chất nền. Đối với các ứng dụng chính xác, hãy cân nhắc sử dụng bộ điều chỉnh bỏ học thấp (LDO) chuyên dụng với nhiễu đầu ra <40 μVrms thay vì chia sẻ nguồn cung cấp hệ thống chính. Điều này trở nên quan trọng khi MEMS chia sẻ bo mạch với bộ phát RF, bộ chuyển đổi DC-DC hoặc trình điều khiển động cơ.
5.3 Hiệu chuẩn và hợp nhất cảm biến
Cảm biến MEMS có sẵn thường có dung sai độ nhạy ±3% và sai số bù ±50 mg (đối với gia tốc kế) hoặc ±3 ° / s (đối với con quay hồi chuyển). Đối với các ứng dụng yêu cầu độ chính xác tốt hơn, hãy thực hiện hiệu chuẩn tại nhà máy hoặc hiện trường. Hiệu chuẩn đa điểm trên nhiệt độ giúp cải thiện độ chính xác lên ±1% hoặc tốt hơn.
Tích hợp trôi con quay hồi chuyển nhanh chóng tích lũy lỗi góc mà không cần chỉnh sửa. Bộ lọc bổ sung hoặc bộ lọc Kalman kết hợp tham chiếu trọng lực gia tốc kế với các phép đo con quay hồi chuyển là điều cần thiết để theo dõi hướng. Lưu ý rằng các phép đo gia tốc kế bao gồm cả trọng lực và gia tốc tuyến tính — thuật toán nhiệt hạch của bạn phải phân biệt giữa chuyển động nghiêng và chuyển động thẳng thực sự.
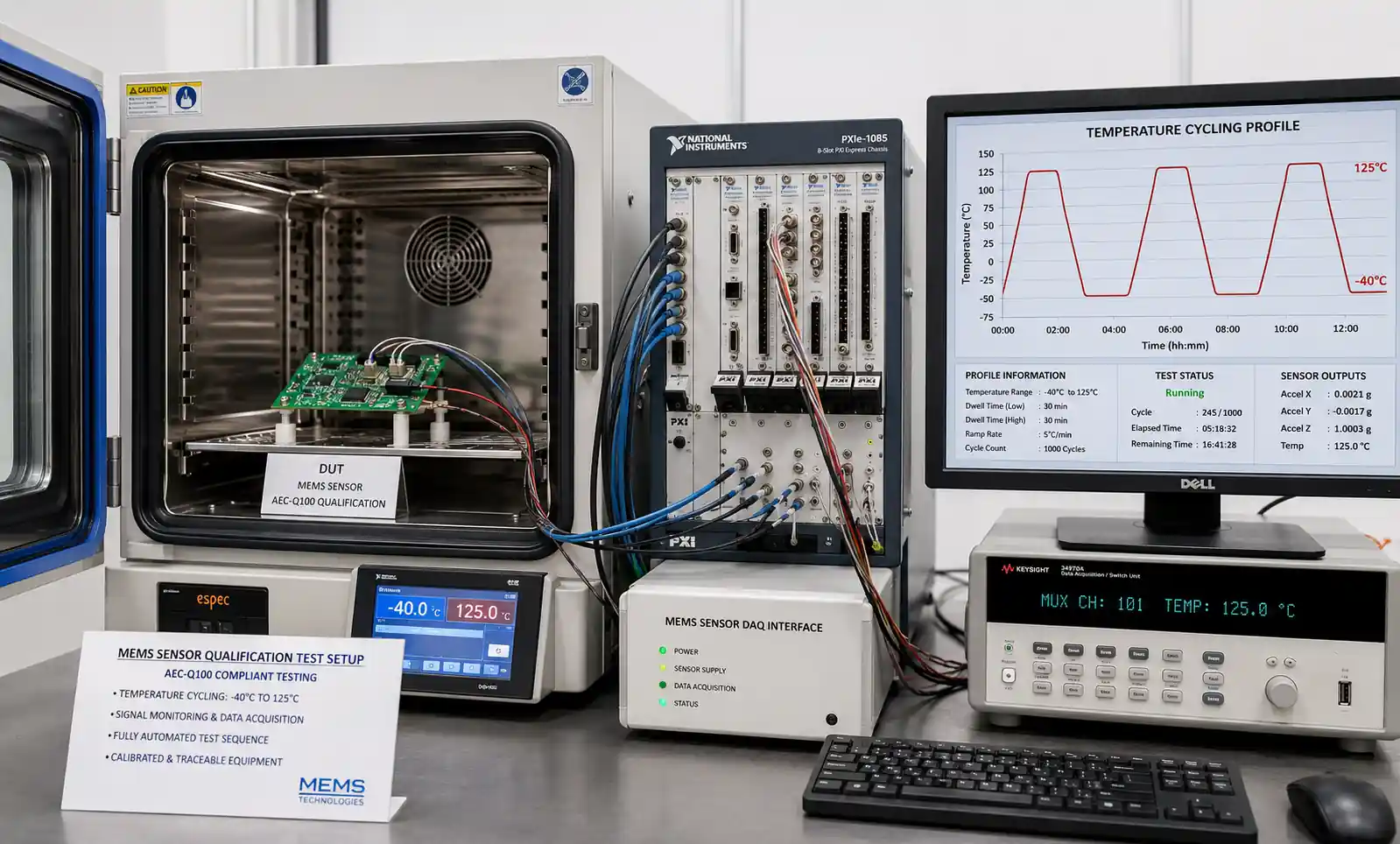
5.4 Kiểm tra căng thẳng môi trường
Độ tin cậy của MEMS phụ thuộc rất nhiều vào trình độ môi trường thích hợp. Đối với các ứng dụng ô tô, các thiết bị phải đáp ứng các tiêu chuẩn AEC-Q100 bao gồm tuổi thọ hoạt động ở nhiệt độ cao (HTOL), chu kỳ nhiệt độ và thử nghiệm va đập cơ học. MEMS cấp tiêu dùng có thể không tồn tại trong chu kỳ nhiệt ô tô từ -40 ° C đến 125 ° C hoặc các cấu hình sốc cơ học điển hình trong các vụ tai nạn ô tô.
Độ ẩm có thể ảnh hưởng đến hiệu suất MEMS, đặc biệt là đối với các thiết bị có cổng âm thanh (cảm biến áp suất, micrô). Nên phủ PCB phù hợp, nhưng tránh che lỗ mở cổng MEMS. Một số cảm biến áp suất bao gồm gel bảo vệ trên màng ngăn cảm biến để cách ly môi trường — xác minh rằng điều này phù hợp với chất lỏng đo của bạn.
6. Cân nhắc về chuỗi cung ứng và tìm nguồn cung ứng
Các thiết bị MEMS được sản xuất bởi một số lượng tương đối nhỏ các nhà cung cấp sử dụng các quy trình chế tạo chuyên dụng, làm cho việc quản lý chuỗi cung ứng trở nên quan trọng đối với vòng đời sản phẩm lâu dài.
6.1 Các nhà cung cấp MEMS chính và thời gian giao hàng
| Nhà cung cấp | Các dòng sản phẩm chính | Thời gian dẫn điển hình | Số lượng đặt hàng tối thiểu | Chứng chỉ chính |
|---|---|---|---|---|
| Cảm biến Bosch | Gia tốc kế, con quay hồi chuyển, cảm biến áp suất, cảm biến môi trường | 12–16 tuần | 3.000–5.000 miếng | AEC-Q100, IATF 16949 |
| STMicroelectronics | IMU, gia tốc kế, con quay hồi chuyển, micrô MEMS | 14–20 tuần | 5.000–10.000 miếng | AEC-Q100, ISO 26262 |
| InvenSense (TDK) | IMU, con quay hồi chuyển, cảm biến áp suất hiệu suất cao | 12–18 tuần | 2.500–7.500 miếng | AEC-Q100 |
| Thiết bị tương tự | Gia tốc kế, con quay hồi chuyển MEMS chính xác | 16–24 tuần | 1.000–3.000 miếng (tùy thuộc vào lớp) | AEC-Q100, đạt tiêu chuẩn hàng không vũ trụ |
| Infineon | Micro MEMS, cảm biến áp suất | 12–16 tuần | 5.000 miếng | Ô tô đủ điều kiện |
Thời gian giao hàng đã kéo dài đáng kể trong những năm gần đây do hạn chế về năng lực trong các xưởng đúc MEMS và nhu cầu ô tô tăng lên. Đối với sản xuất số lượng lớn, hãy thu hút các nhà cung cấp sớm trong giai đoạn thiết kế và xem xét các thỏa thuận cung cấp dài hạn. Nhiều nhà sản xuất MEMS cung cấp các mẫu kỹ thuật với thời gian tạo mẫu ngắn hơn, nhưng việc chuyển đổi sang đơn đặt hàng sản xuất đòi hỏi phải lập kế hoạch trước 6–9 tháng.
6.2 Xử lý lỗi thời và nguồn cung ứng thứ hai
Các sản phẩm MEMS thường có vòng đời 7–10 năm, ngắn hơn nhiều ứng dụng công nghiệp hoặc ô tô yêu cầu. Theo dõi chặt chẽ thông báo thay đổi sản phẩm (PCN) và thông báo hết hạn sử dụng (EOL). Khi cảm biến MEMS tiếp cận EOL, việc di chuyển sang thế hệ mới hơn thường yêu cầu thay đổi chương trình cơ sở do các thông số kỹ thuật độ nhạy, giao thức truyền thông hoặc sơ đồ chân gói khác nhau.
Tìm nguồn cung ứng thứ hai thực sự cho MEMS là một thách thức vì thiết bị của mỗi nhà sản xuất có những đặc điểm riêng. Ngay cả các bộ phận "tương thích" từ các nhà cung cấp khác nhau cũng yêu cầu cập nhật hiệu chuẩn và kiểm tra xác nhận. Đối với các ứng dụng quan trọng, hãy thương lượng số lượng mua lần cuối hoặc xem xét các lựa chọn thay thế tương thích với chân được xác định trong giai đoạn thiết kế ban đầu.
Làm việc với các nhà phân phối được ủy quyền như Digi-Key, Mouser hoặc Arrow, những người cung cấp khả năng hiển thị và truy xuất nguồn gốc hàng tồn kho theo thời gian thực để tránh các thành phần giả mạo. Cảm biến MEMS giả, mặc dù ít phổ biến hơn so với IC, nhưng vẫn tồn tại trên thị trường — đặc biệt là đối với các thiết bị ô tô hoặc công nghiệp có giá trị cao.
7. Câu hỏi thường gặp
Sự khác biệt giữa MEMS và cảm biến bán dẫn truyền thống là gì?
Các thiết bị MEMS tích hợp các cấu trúc cơ học (như khối lượng lơ lửng, màng ngăn hoặc chùm cộng hưởng) với các mạch điện tử trên một chip silicon duy nhất bằng cách sử dụng kỹ thuật chế tạo chất bán dẫn. Cảm biến bán dẫn truyền thống, chẳng hạn như cảm biến hiệu ứng Hall hoặc điốt quang, hoàn toàn dựa vào các đặc tính điện tử mà không có cấu trúc cơ học. Tích hợp cơ điện này cho phép MEMS đo các đại lượng vật lý như gia tốc, áp suất hoặc quay với lợi thế về kích thước, công suất và chi phí tuyệt vời so với các cảm biến cơ học rời rạc.
Làm cách nào để chọn giữa cảm biến MEMS đầu ra tương tự và kỹ thuật số?
Cảm biến MEMS tương tự cung cấp đầu ra điện áp hoặc dòng điện tỷ lệ thuận với đại lượng đo, yêu cầu ADC bên ngoài và mang lại sự linh hoạt tối đa trong xử lý tín hiệu. Chọn đầu ra tương tự khi bạn cần lọc tùy chỉnh, tốc độ lấy mẫu rất cao (>10 kHz) hoặc khi tích hợp với các chuỗi tín hiệu tương tự hiện có. Cảm biến MEMS kỹ thuật số (SPI, I²C) bao gồm các ADC tích hợp, bù nhiệt độ và các tính năng tự kiểm tra, đơn giản hóa thiết kế hệ thống và giảm số lượng thành phần. Giao diện kỹ thuật số được ưu tiên cho hầu hết các thiết kế hiện đại trừ khi tốc độ lấy mẫu hoặc yêu cầu tùy chỉnh yêu cầu tương tự.
Tôi cần loại AEC-Q100 nào cho các ứng dụng MEMS ô tô?
Chứng chỉ AEC-Q100 xác định các cấp độ nhiệt độ ô tô: Cấp 0 (-40 ° C đến 150 ° C) cho khoang động cơ, Cấp 1 (-40 ° C đến 125 ° C) cho ô tô nói chung, Cấp 2 (-40 ° C đến 105 ° C) cho khoang hành khách và Cấp 3 (-40 ° C đến 85 ° C) cho các hệ thống không quan trọng. Hầu hết các cảm biến MEMS ô tô đều đạt tiêu chuẩn Cấp 1. Đối với các ứng dụng ADAS hoặc ESC quan trọng về an toàn, hãy xác minh việc tuân thủ an toàn chức năng ISO 26262 (thường là ASIL B hoặc C) ngoài tiêu chuẩn AEC-Q100 cơ bản.
Nhiệt độ ảnh hưởng đến độ chính xác của cảm biến MEMS như thế nào?
Nhiệt độ ảnh hưởng đến cảm biến MEMS thông qua nhiều cơ chế: giãn nở nhiệt làm thay đổi kích thước cấu trúc cơ học, ảnh hưởng đến độ nhạy; các đặc tính vật liệu phụ thuộc vào nhiệt độ làm thay đổi các đặc tính điện, tạo ra độ trôi bù đắp; và ứng suất đóng gói thay đổi theo nhiệt độ. Chỉ định tổng ngân sách lỗi bao gồm hệ số bù nhiệt độ (TCO) và hệ số độ nhạy nhiệt độ (TCS) trên toàn bộ phạm vi hoạt động của bạn. MEMS chất lượng cao bao gồm bù nhiệt độ bên trong, nhưng sai số dư 0,01%/°C (độ nhạy) và 1 mg/°C hoặc 0,01°/s/°C (bù đắp) là điển hình ngay cả sau khi bù.
Cảm biến MEMS có thể chịu sốc cơ học trong quá trình vận chuyển và xử lý không?
Hầu hết các cảm biến MEMS được đánh giá về sốc cơ học trong khoảng 3.000–10.000g trong thời lượng <1 ms khi không được cấp nguồn, bao gồm các tình huống vận chuyển và thả thông thường. Tuy nhiên, hoạt động được cấp nguồn thường làm giảm khả năng chịu sốc xuống còn 1.500–2.000g vì mạch điện bên trong phải duy trì hoạt động. Luôn tuân theo các khuyến nghị của nhà sản xuất về các điểm dừng và lắp đặt cơ học để tránh hư hỏng hàng loạt. Đối với môi trường va chạm khắc nghiệt (va chạm ô tô, ứng dụng quân sự), hãy chỉ định các thiết bị đủ tiêu chuẩn rõ ràng để sống sót ở g cao và thực hiện gắn PCB thích hợp với cách ly rung động nếu cần.
Nguyên nhân nào gây ra sự trôi dạt của con quay hồi chuyển MEMS và làm cách nào để giảm thiểu nó?
Trôi con quay hồi chuyển MEMS (không ổn định phân cực) là kết quả của nhiều nguồn: nhiễu điện tử trong mạch đọc, nhiễu cơ nhiệt trong cấu trúc cộng hưởng và các hiệu ứng phụ thuộc vào nhiệt độ trong cơ chế cảm biến Coriolis. Giảm thiểu độ trôi bằng cách: (1) duy trì nhiệt độ hoạt động ổn định thông qua quản lý nhiệt, (2) thực hiện ước tính độ lệch thời gian chạy bằng cách sử dụng cập nhật vận tốc bằng không hoặc khoảng thời gian đứng yên, (3) hợp nhất dữ liệu con quay hồi chuyển với đầu vào gia tốc kế và từ kế thông qua bộ lọc Kalman và (4) chọn con quay hồi chuyển cấp ô tô hoặc chiến thuật với độ ổn định phân cực <5 ° / h cho các ứng dụng yêu cầu theo dõi góc chính xác. Hiệu chuẩn tại nhà máy trên nhiệt độ giúp cải thiện hơn nữa hiệu suất.
Có dấu chân tiêu chuẩn cho cảm biến MEMS để cho phép tìm nguồn thứ hai không?
Không giống như một số thành phần thụ động, cảm biến MEMS không có dấu chân thực sự được tiêu chuẩn hóa giữa các nhà sản xuất. Tuy nhiên, các loại gói phổ biến tồn tại: các gói LGA (mảng lưới đất) như 3x3x1 mm hoặc 2.5x3x0.9 mm được sử dụng rộng rãi và một số nhà cung cấp cung cấp "sơ đồ chân tiêu chuẩn ngành" được thiết kế để tương thích. Tuy nhiên, nguồn thứ hai thường yêu cầu thiết kế lại PCB hoặc mạch bộ điều hợp vì ngay cả các gói tương thích về mặt cơ học cũng có thể có các gán chân, giao thức truyền thông hoặc hướng trục lắp khác nhau. Thiết kế bố cục của bạn với các biến thể dấu chân tiềm năng nếu nguồn thứ hai là rất quan trọng.
Cần kiểm tra gì để xác thực lựa chọn cảm biến MEMS cho ứng dụng của tôi?
Kiểm tra xác thực phải bao gồm: (1) kiểm tra chức năng trên toàn bộ phạm vi nhiệt độ hoạt động để xác minh thông số kỹ thuật chính xác, (2) đo mức tiêu thụ điện năng trong tất cả các chế độ hoạt động để xác nhận tính toán tuổi thọ pin, (3) kiểm tra sốc và rung cơ học theo hồ sơ môi trường của ứng dụng của bạn, (4) kiểm tra khả năng tương thích điện từ (EMC) để đảm bảo đầu ra của cảm biến không bị hỏng bởi nhiễu hệ thống, (5) mô tả đặc tính trôi dài hạn nếu độ chính xác theo thời gian là rất quan trọng, và (6) xác minh căn chỉnh trục để đảm bảo hệ tọa độ cảm biến phù hợp với khung tham chiếu cơ học của bạn. Đối với các hệ thống quan trọng về an toàn, cần phải xác nhận an toàn chức năng bổ sung theo ISO 26262 hoặc IEC 61508.
8. Kết luận và các bước tiếp theo
Công nghệ MEMS đã thay đổi cơ bản việc tích hợp cảm biến trong các hệ thống điện tử hiện đại, cung cấp sự kết hợp chưa từng có giữa kích thước nhỏ, tiêu thụ điện năng thấp và hiệu quả chi phí cho phép đổi mới trên các ứng dụng ô tô, công nghiệp, IoT và tiêu dùng. Lựa chọn MEMS thành công đòi hỏi phải cân bằng nhiều thông số kỹ thuật — độ nhạy so với phạm vi, công suất so với hiệu suất, độ chính xác so với chi phí — đồng thời xem xét sự ổn định lâu dài của chuỗi cung ứng và các yêu cầu về chất lượng môi trường.
Khi chọn các thành phần MEMS cho thiết kế của bạn, hãy ưu tiên những cân nhắc chính sau: trước tiên, xác định rõ các yêu cầu về phạm vi đo, độ chính xác và băng thông của ứng dụng để tránh chỉ định quá nhiều các cảm biến hiệu suất cao đắt tiền hoặc chỉ định thiếu và yêu cầu thiết kế lại tốn kém. Thứ hai, đánh giá cẩn thận ảnh hưởng của nhiệt độ và đảm bảo độ chính xác được chỉ định bao gồm toàn bộ phạm vi nhiệt độ hoạt động của bạn. Thứ ba, lập kế hoạch sớm cho bố cục PCB và kiến trúc cung cấp điện của bạn để giảm thiểu khớp nối nhiễu và hiệu ứng ứng suất cơ học. Cuối cùng, tham gia với các nhà cung cấp trong giai đoạn thiết kế để đảm bảo tính khả dụng lâu dài và hiểu thời gian giao hàng cho khối lượng sản xuất.
Đối với các ứng dụng yêu cầu độ chính xác cao, độ trôi thấp hoặc hoạt động trong môi trường khắc nghiệt, hãy đầu tư vào các quy trình hiệu chuẩn thích hợp và thuật toán tổng hợp cảm biến — các phương pháp phần mềm này thường mang lại hiệu suất tổng thể hệ thống tốt hơn so với việc chỉ chọn thiết bị MEMS cao cấp nhất. Đối với ô tô hoặc các hệ thống quan trọng về an toàn, hãy xác minh cả chất lượng AEC-Q và tuân thủ an toàn chức năng (ISO 26262 hoặc tương đương) trước khi hoàn thiện thiết kế của bạn.
Các bước tiếp theo được đề xuất:
- Tải xuống bảng dữ liệu chi tiết cho các cảm biến MEMS ứng cử viên phù hợp với yêu cầu ứng dụng của bạn
- Yêu cầu bảng đánh giá hoặc bộ công cụ phát triển để xác thực hiệu suất trong môi trường hệ thống thực tế của bạn trước khi cam kết với các đơn đặt hàng số lượng lớn
- Tham khảo ý kiến của các kỹ sư ứng dụng hiện trường (FAE) của nhà cung cấp để đánh giá thiết kế, đặc biệt là đối với các dự án tích hợp MEMS lần đầu tiên
- Sử dụng các công cụ lựa chọn tham số trực tuyến từ các nhà sản xuất lớn để nhanh chóng lọc các tùy chọn theo thông số kỹ thuật chính
- Nếu thiết kế cho vòng đời sản phẩm dài (>5 năm), hãy thiết lập liên lạc trực tiếp với các nhà cung cấp MEMS về lộ trình sản phẩm và lập kế hoạch EOL
Thị trường MEMS tiếp tục phát triển nhanh chóng, với những cải tiến liên tục về hiệu suất tiếng ồn, mức tiêu thụ điện năng và mật độ tích hợp. Cập nhật thông tin về các bản phát hành thiết bị mới và khả năng sản xuất sẽ giúp bạn tối ưu hóa thiết kế của mình cho cả sản xuất hiện tại và các thế hệ sản phẩm trong tương lai.