

LiDAR cơ học so với LiDAR trạng thái rắn: Hướng dẫn lựa chọn kiến trúc, hiệu suất và kỹ thuật
LiDAR (Light Detection and Ranging) đã trở thành một công nghệ cảm biến cơ bản cho xe tự hành, robot, lập bản đồ không gian địa lý và cơ sở hạ tầng thông minh. Bằng cách đo thời gian cần thiết để xung laser phản xạ từ các vật thể, hệ thống LiDAR tạo ra các biểu diễn ba chiều có độ chính xác cao về môi trường xung quanh.
Hai kiến trúc chính thống trị thị trường: LiDAR cơ học và LiDAR trạng thái rắn. LiDAR cơ học dựa vào các cụm quang học xoay để đạt được khả năng quét góc rộng, trong khi LiDAR trạng thái rắn loại bỏ các bộ phận chuyển động thông qua công nghệ điều khiển chùm tia dựa trên chất bán dẫn.
Bài viết này xem xét kiến trúc kỹ thuật, nguyên tắc hoạt động, thành phần bên trong, đặc điểm hiệu suất và ứng dụng trong thế giới thực của cả hai loại LiDAR. Nó cũng cung cấp tiêu chí lựa chọn thực tế cho các nhà thiết kế hệ thống, giúp các kỹ sư xác định giải pháp LiDAR phù hợp nhất dựa trên phạm vi, độ phân giải, độ tin cậy và yêu cầu tích hợp.
Mục lục
- [1. Các nguyên tắc cơ bản của công nghệ LiDAR] (# 1-nguyên tắc cơ bản của công nghệ lidar)
- [2. Kiến trúc LiDAR cơ học] (# 2-kiến trúc cơ học-lidar)
- [3. Nguyên lý hoạt động của LiDAR cơ học] (# 3-nguyên lý hoạt động của-lidar cơ học)
- [4. Các thành phần cốt lõi của hệ thống LiDAR cơ học] (# 4-core-components-of-mechanical-lidar-systems)
- [5. Kiến trúc LiDAR trạng thái rắn] (# 5-solid-state-lidar-architecture)
- [6. Công nghệ quét LiDAR trạng thái rắn] (# 6-công nghệ quét lidar trạng thái rắn)
- [7. Các thành phần cốt lõi của LiDAR trạng thái rắn] (# 7-core-components-of-solid-state-lidar)
- [8. LiDAR cơ học và trạng thái rắn: So sánh kỹ thuật] (# 8-cơ học vs-trạng thái rắn-lidar-kỹ thuật-so sánh)
- [9. Các ứng dụng chính của hệ thống LiDAR] (# 9-ứng dụng chính của-hệ thống lidar)
- 10. Các yếu tố chính khi chọn hệ thống LiDAR
- Câu hỏi thường gặp
- Kết luận
1. Các nguyên tắc cơ bản của công nghệ LiDAR
LiDAR (Phát hiện và Phạm vi ánh sáng) là một công nghệ cảm biến quang học chủ động xác định khoảng cách giữa cảm biến và vật thể bằng cách đo thời gian bay (ToF) của xung laser.
Quy trình đo lường cơ bản bao gồm ba bước:
- Phát xạ laser - Một xung laser ngắn được truyền về phía môi trường.
- Phản xạ - Xung phản xạ từ các vật thể như địa hình, phương tiện hoặc cấu trúc.
- Phát hiện - Một bộ tách sóng quang đo tín hiệu trở lại và ghi lại thời gian di chuyển.
Khoảng cách được tính bằng cách sử dụng:
Khoảng cách = (c × t) / 2
Trong đó:
- c = tốc độ ánh sáng
- t = thời gian di chuyển khứ hồi của xung laser
Bằng cách lặp lại quá trình này hàng triệu lần mỗi giây và quét theo nhiều hướng, hệ thống LiDAR tạo ra đám mây điểm 3D dày đặc đại diện cho môi trường xung quanh.
2. Kiến trúc LiDAR cơ học
LiDAR cơ học
- Hình 1. Kiến trúc cảm biến xoay LiDAR cơ học*
LiDAR cơ học là kiến trúc LiDAR được triển khai thương mại sớm nhất. Nó sử dụng cụm quang học xoay để quét môi trường và thu thập các phép đo không gian.
Các hệ thống điển hình bao gồm một đầu quay chứa:
- Bộ phát laser
- Bộ tách sóng quang
- Quét gương
- ống kính quang học
Toàn bộ cụm quay bằng cách sử dụng động cơ chính xác, cho phép LiDAR đạt được trường nhìn ngang 360 độ.
Do khả năng thu thập dữ liệu độ phân giải cao góc rộng, LiDAR cơ học trong lịch sử đã được sử dụng trong:
- Nguyên mẫu xe tự hành ban đầu
- Lập bản đồ địa hình có độ phân giải cao
- Nghiên cứu robot
- Hệ thống khảo sát
Tuy nhiên, sự hiện diện của các bộ phận chuyển động gây ra mối quan tâm về độ phức tạp cơ học, chi phí và độ tin cậy.
3. Nguyên lý hoạt động của LiDAR cơ học
Quy trình quét LiDAR cơ học
- Hình 2. Nguyên tắc quét 360 độ LiDAR cơ học*
Hệ thống LiDAR cơ học thực hiện quét môi trường thông qua việc quay liên tục cụm cảm biến.
Quy trình làm việc điển hình bao gồm:
Quét xoay
Một động cơ tốc độ cao quay đầu cảm biến, thường từ 5 đến 20 vòng / giây.
Phát xạ xung laser
Nhiều tia laser được căn chỉnh theo chiều dọc phát ra xung trong quá trình quay, tạo ra một mẫu quét hình trụ.
Đo thời gian bay
Bộ tách sóng quang đo thời gian quay trở lại của các xung phản xạ để xác định khoảng cách vật thể.
Tạo đám mây điểm
Các phép đo khoảng cách được kết hợp với dữ liệu góc quay và hướng của cảm biến để tạo ra đám mây điểm không gian 3D.
Hệ thống LiDAR cơ học cao cấp có thể tạo ra hàng triệu điểm mỗi giây, cho phép lập bản đồ môi trường có độ chi tiết cao.
4. Các thành phần cốt lõi của hệ thống LiDAR cơ học
Một cảm biến LiDAR cơ học điển hình tích hợp một số hệ thống con quan trọng.
Máy phát laser
Tạo ra các xung laser ngắn, thường sử dụng laser bước sóng 905 nm hoặc 1550 nm .
Bộ thu tách sóng quang
Phát hiện các photon phản xạ và chuyển đổi tín hiệu quang thành tín hiệu điện. Các loại máy dò phổ biến bao gồm:
- Điốt quang tuyết lở (APD)
- Điốt tuyết lở đơn photon (SPAD)
Cơ chế quét xoay
Động cơ và vòng bi cơ khí quay cụm quang học để cung cấp phạm vi bảo hiểm đầy đủ cho môi trường.
Bộ xử lý tín hiệu
Thực hiện khuếch đại tín hiệu, lọc và tính toán khoảng cách bằng thuật toán ToF.
Cảm biến định vị và chuyển động
Các hệ thống như GPS, IMU và con quay hồi chuyển cung cấp dữ liệu định hướng để căn chỉnh chính xác các phép đo LiDAR theo tọa độ toàn cầu.
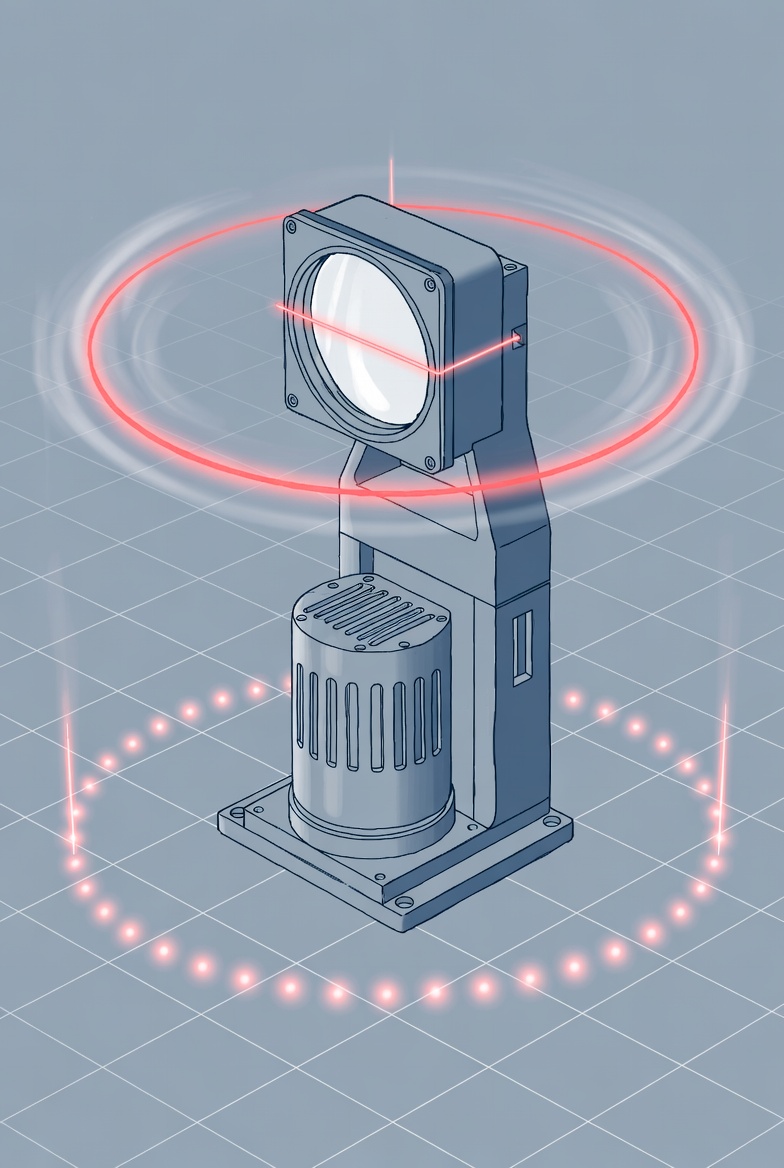
5. Kiến trúc LiDAR trạng thái rắn
LiDAR trạng thái rắn
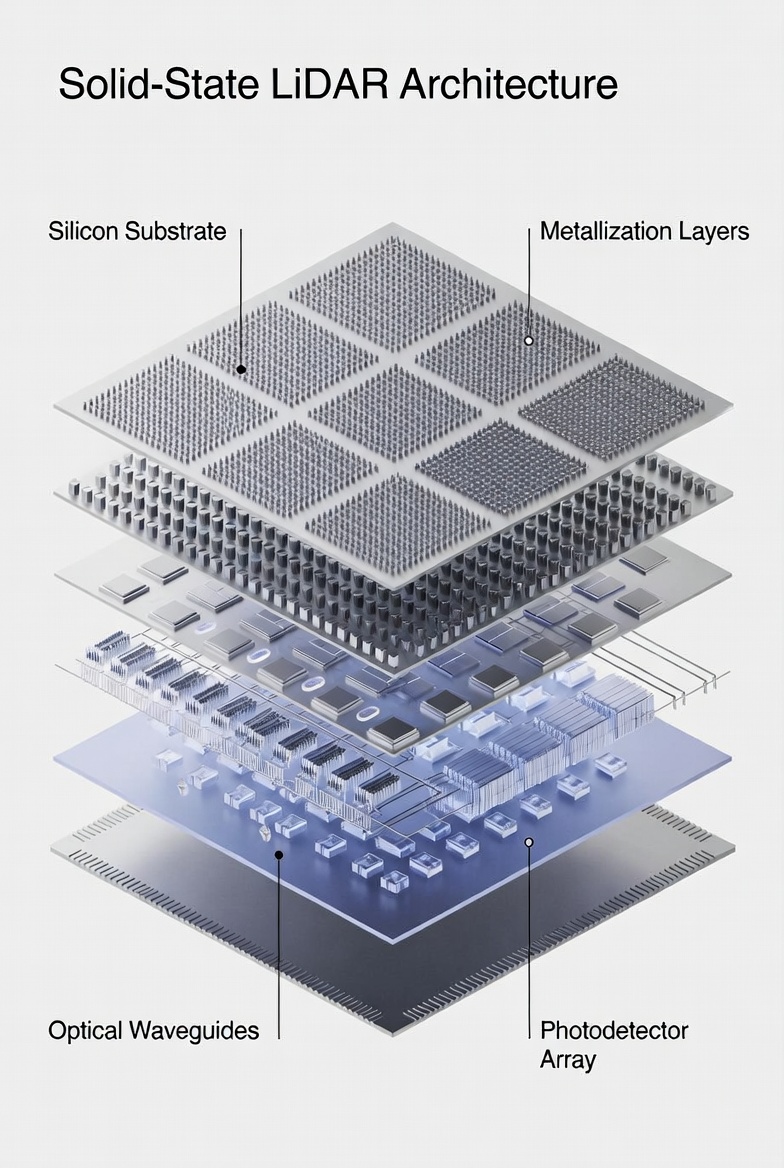
- Hình 3. Kiến trúc bán dẫn LiDAR trạng thái rắn*
LiDAR thể rắn đại diện cho thế hệ cảm biến LiDAR mới hơn được thiết kế không xoay cơ học . Thay vào đó, điều khiển chùm tia đạt được bằng cách sử dụng các thành phần điện tử hoặc quang tử .
Ưu điểm bao gồm:
- kích thước vật lý nhỏ hơn
- Độ tin cậy cao hơn
- Tiêu thụ điện năng thấp hơn
- Khả năng mở rộng tốt hơn để sản xuất hàng loạt
LiDAR thể rắn đã trở thành giải pháp ưa thích cho hệ thống cảm biến cấp ô tô và nền tảng nhận thức nhúng.
6. Công nghệ quét LiDAR thể rắn
LiDAR trạng thái rắn có thể được triển khai bằng một số công nghệ quét khác nhau.
MEMS LiDAR
Sử dụng gương cơ điện vi mô để điều khiển chùm tia laser. Những gương này dao động ở tốc độ cao để quét trên trường nhìn.
Thuận lợi:
- Thiết kế nhỏ gọn
- Chi phí vừa phải
- Độ phân giải tốt
LiDAR flash
Chiếu sáng toàn bộ cảnh trong một xung duy nhất bằng chùm tia laser rộng và chụp phản xạ bằng Mảng cảm biến 2D.
Thuận lợi:
- Không cần quét
- Tốc độ khung hình cực nhanh
Hạn chế:
- Phạm vi phát hiện ngắn hơn
- Yêu cầu năng lượng cao hơn
Mảng pha quang học (OPA)
Sử dụng điều khiển pha quang tử tích hợp để điều khiển chùm tia laser bằng điện tử mà không cần các bộ phận chuyển động.
Thuận lợi:
- Thiết kế trạng thái rắn hoàn toàn
- Độ tin cậy cao
- Tích hợp chip có thể mở rộng
Tuy nhiên, công nghệ OPA vẫn đang phát triển và vẫn tương đối đắt đỏ.
7. Các thành phần cốt lõi của LiDAR trạng thái rắn
LiDAR thể rắn tích hợp nhiều mô-đun dựa trên chất bán dẫn.
Mảng phát laser
Tạo ra nhiều chùm tia laser đồng thời để cho phép quét tốc độ cao.
Mảng phát sóng quang
Nhận các photon phản xạ và chuyển đổi chúng thành tín hiệu điện.
Mô-đun lái chùm tia
Thực hiện quét bằng gương MEMS, quang tử OPA hoặc chuyển mạch điện tử.
Xử lý và điều khiển điện tử
Bộ xử lý nhúng thực hiện:
- khuếch đại tín hiệu
- Lọc tiếng ồn
- tính toán khoảng cách
- Tái tạo đám mây điểm
Các hệ thống này thường tích hợp ASIC hoặc bộ xử lý FPGA để xử lý dữ liệu theo thời gian thực.
8. LiDAR cơ khí và trạng thái rắn: So sánh kỹ thuật
| Đặc tính | LiDAR cơ học | LiDAR trạng thái rắn |
|---|---|---|
| Phương pháp quét | Lắp ráp quang học xoay | Hệthống lái chùm tia điện tử hoặc quang tử |
| Bộ phận chuyển động | Có | Không có hoặc tối thiểu |
| Lĩnh vực của View | Lên đến 360 ° | Điển hình là 90 ° –180 ° |
| Kích thước | Vỏ cảm biến lớn | Mô-đun bán dẫn nhỏ gọn |
| Độ tin cậy | Cóthể mài mòn cơ học | Độtin cậy lâu dài cao hơn |
| Sản xuất | Lắp ráp cơ khí phức tạp | Sản xuất chất bán dẫn có thể mở rộng |
| Xu hướng chi phí | Cao hơn | Giảm với sản xuất hàng loạt |
LiDAR cơ học thường cung cấp độ phân giải góc cao hơn và phạm vi phủ sóng rộng hơn, trong khi LiDAR thể rắn cung cấp độ tin cậy và tiềm năng tích hợp tốt hơn.
9. Các ứng dụng chính của hệ thống LiDAR
Kịch bản ứng dụng LiDAR
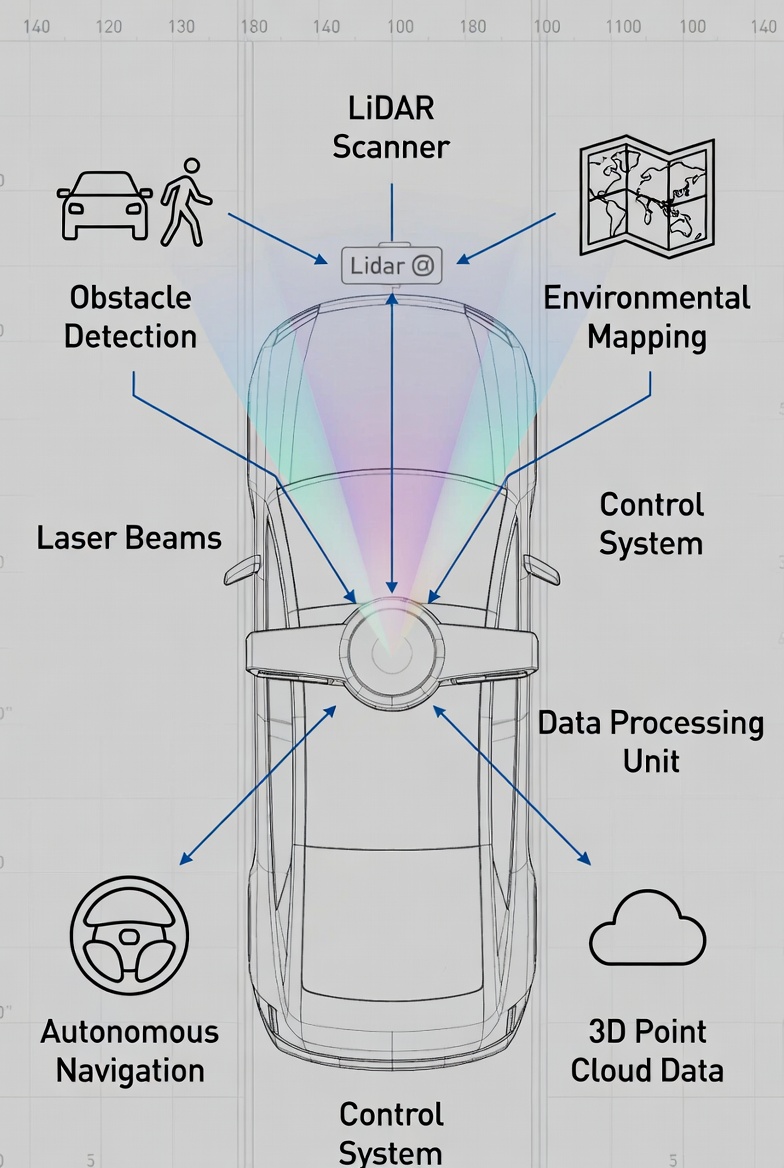
Hình 4. Ứng dụng LiDAR trong hệ thống tự trị
Công nghệ LiDAR đã trở nên cần thiết trong một số ứng dụng cảm biến tiên tiến.
Xe tự hành
LiDAR cho phép các phương tiện phát hiện chướng ngại vật, xác định ranh giới đường và xây dựng bản đồ 3D thời gian thực về môi trường xung quanh.
Robot và Tự động hóa
Rô-bốt công nghiệp và rô-bốt di động sử dụng LiDAR để bản địa hóa và lập bản đồ đồng thời (SLAM).
Lập bản đồ không gian địa lý
Hệ thống LiDAR trên không tạo bản đồ địa hình có độ phân giải cao được sử dụng trong:
- mô hình địa hình
- Quy hoạch cơ sở hạ tầng
- Phân tích rủi ro lũ lụt
Giám sát lâm nghiệp và môi trường
LiDAR thâm nhập vào các lớp thảm thực vật để đo:
- Cấu trúc tán cây
- chiều cao cây
- độ cao địa hình bên dưới rừng
Thành phố thông minh và cơ sở hạ tầng
Các nhà quy hoạch đô thị sử dụng LiDAR để tạo mô hình thành phố 3D có độ chính xác cao để mô phỏng và lập kế hoạch.
10. Các yếu tố chính khi chọn hệ thống LiDAR
Việc chọn đúng hệ thống LiDAR đòi hỏi phải cân bằng các hạn chế về hiệu suất, tích hợp và chi phí.
Phạm vi phát hiện
Phạm vi xác định khoảng cách cảm biến có thể phát hiện các đối tượng một cách đáng tin cậy. Hệ thống lái xe tự động thường yêu cầu 150–300 mét.
Độ phân giải góc
Độ phân giải cao hơn dẫn đến các đám mây điểm dày đặc hơn và nhận dạng đối tượng tốt hơn.
Trường nhìn (FOV)
FOV ngang và dọc rộng cải thiện nhận thức về môi trường.
Tốc độ khung hình
Tần số quét cao hơn cho phép phát hiện các đối tượng chuyển động nhanh hơn.
Kích thước và tích hợp
Cảm biến nhỏ gọn rất quan trọng đối với máy bay không người lái, robot và hệ thống nhúng.
Công suất tiêu thụ
Thiết kế công suất thấp rất cần thiết cho các thiết bị di động và chạy bằng pin.
Câu hỏi thường gặp
Tại sao hệ thống LiDAR trạng thái rắn trở nên phổ biến hơn?
LiDAR thể rắn loại bỏ các bộ phận cơ khí, cải thiện độ tin cậy đồng thời cho phép giảm chi phí sản xuất thông qua các quy trình chế tạo chất bán dẫn.
LiDAR cơ học có cung cấp độ chính xác tốt hơn không?
LiDAR cơ học thường cung cấp độ phân giải góc cao hơn và phạm vi quét rộng hơn, điều này có thể dẫn đến các đám mây điểm chi tiết hơn.
Bước sóng nào thường được sử dụng trong các hệ thống LiDAR?
Hầu hết các hệ thống LiDAR hoạt động ở bước sóng 905 nm hoặc 1550 nm do đặc tính truyền dẫn khí quyển và an toàn.
LiDAR có thể hoạt động trong thời tiết xấu không?
Hiệu suất có thể giảm khi mưa lớn, sương mù hoặc tuyết vì các hạt trong không khí tán xạ ánh sáng laser và làm giảm cường độ tín hiệu.
Kết luận
LiDAR đã trở thành công nghệ cảm biến nền tảng cho các hệ thống tự động hiện đại và các ứng dụng lập bản đồ không gian. LiDAR cơ học cung cấp khả năng quét 360 độ có độ phân giải cao và trong lịch sử là kiến trúc thống trị trong các nền tảng nghiên cứu và lập bản đồ. Tuy nhiên, sự gia tăng của các công nghệ dựa trên chất bán dẫn đã đẩy nhanh việc áp dụng LiDAR trạng thái rắn do kích thước nhỏ gọn, độ tin cậy và khả năng mở rộng của nó.
Đối với các kỹ sư và nhà thiết kế hệ thống, việc lựa chọn giải pháp LiDAR thích hợp đòi hỏi phải xem xét cẩn thận phạm vi, độ phân giải, trường nhìn, mức tiêu thụ điện năng và các hạn chế tích hợp. Khi sản xuất quang tử và chất bán dẫn tiếp tục phát triển, LiDAR trạng thái rắn dự kiến sẽ đóng một vai trò ngày càng quan trọng trong các nền tảng cảm biến thế hệ tiếp theo.