

Bảng mạch máy bay không người lái: Thành phần, kiến trúc và công nghệ điều khiển bay tiên tiến
Bảng mạch máy bay không người lái — thường được gọi là PCB điều khiển chuyến bay — tạo thành kiến trúc điện tử trung tâm của máy bay không người lái (UAV) hiện đại. Các bo mạch này tích hợp cảm biến, xử lý tín hiệu, điều khiển động cơ, quản lý năng lượng và giao tiếp không dây vào một hệ thống nhúng nhỏ gọn.
Từ góc độ kỹ thuật hệ thống, PCB máy bay không người lái hoạt động như một nền tảng điều khiển thời gian thực xử lý dữ liệu từ cảm biến quán tính, diễn giải các lệnh thí điểm, thực hiện các thuật toán ổn định và phân phối năng lượng cho các hệ thống con đẩy.
Bài viết này cung cấp phân tích kỹ thuật của bảng mạch máy bay không người lái, bao gồm kiến trúc, đường ống xử lý tín hiệu, thiết kế hệ thống con, giao diện truyền thông, chế độ lỗi điển hình và các xu hướng mới nổi trong điện tử UAV và sản xuất PCB.
Mục lục
- [1. Bảng mạch máy bay không người lái là gì?](# 1-bảng mạch máy bay không người lái là gì)
- [2. Bảng mạch Drone hoạt động như thế nào] (# 2-how-a-drone-circuit-board-works)
- [3. Các thành phần cốt lõi của bộ điều khiển bay không người lái] (# 3-core-components-of-a-drone-flight-controller)
- [4. Các loại bảng mạch được sử dụng trong máy bay không người lái] (# 4 loại bảng mạch được sử dụng trong máy bay không người lái)
- [5. Đường ống xử lý tín hiệu trong điện tử máy bay không người lái] (# 5-tín hiệu-xử lý-đường ống-trong-máy bay không người lái-điện tử)
- [6. Phân phối điện và quản lý năng lượng] (# 6-phân phối điện và quản lý năng lượng)
- [7. Hệ thống thông tin liên lạc trên bảng mạch máy bay không người lái] (# 7-hệ thống truyền thông trên bảng mạch máy bay không người lái)
- [8. Các lỗi và khắc phục sự cố PCB của máy bay không người lái phổ biến] (# 8-common-drone-pcb-failures-and-troubleshooting)
- [9. Sửa chữa bảng mạch máy bay không người lái bị hư hỏng] (# 9-sửa chữa bảng mạch máy bay không người lái bị hư hỏng)
- [10. Nâng cấp và sửa đổi bảng mạch máy bay không người lái] (# 10-nâng cấp và sửa đổi bảng mạch máy bay không người lái)
- [11. Xu hướng mới nổi trong điện tử máy bay không người lái và công nghệ PCB] (# 11-xu hướng mới nổi-trong-máy bay không người lái-điện tử-và-công nghệ pcb)
- [12. Câu hỏi thường gặp](#12-câu hỏi thường gặp)
- [13. Kết luận] (# 13-kết luận)
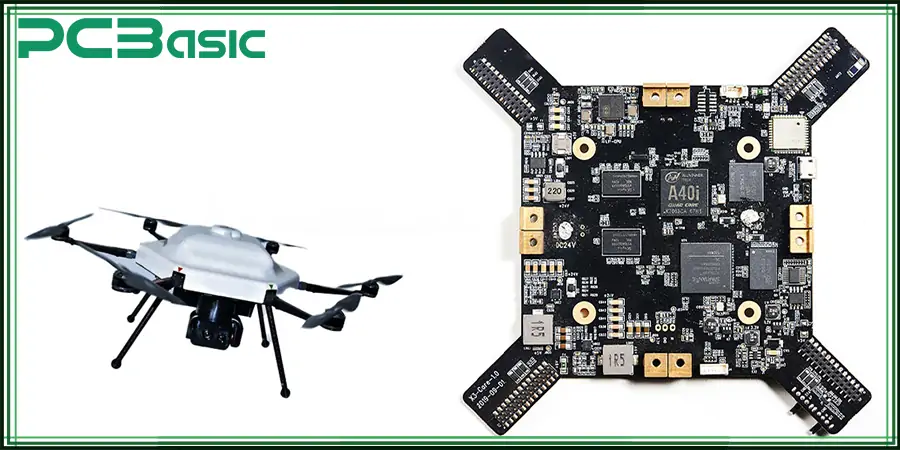
1. Bảng mạch máy bay không người lái là gì?
Bảng mạch máy bay không người lái là hệ thống điện tử nhúng chính chịu trách nhiệm điều khiển chuyến bay, điều hướng, xử lý tín hiệu và điều phối hệ thống con trong UAV.
Trong hầu hết các máy bay không người lái hiện đại, bo mạch này được gọi là bộ điều khiển bay (FC). Nó tích hợp nhiều hệ thống con điện tử bao gồm:
- Vi điều khiển hoặc bộ xử lý nhúng
- Đơn vị đo lường quán tính (IMU)
- Mạch điều chỉnh công suất
- Giao diện điều khiển động cơ
- Mô-đun giao tiếp
- Giao diện cảm biến ngoại vi
Từ góc độ kiến trúc hệ thống, bộ điều khiển chuyến bay hoạt động như một hệ thống điều khiển vòng kín. Nó liên tục đo trạng thái vật lý của máy bay không người lái (vị trí, vận tốc, hướng) và điều chỉnh công suất động cơ để duy trì chuyến bay ổn định.
2. Cách hoạt động của bảng mạch Drone
Bộ điều khiển bay không người lái hoạt động thông qua vòng điều khiển phản hồi thời gian thực . Vòng lặp này thường chạy ở 500 Hz - 8 kHz , tùy thuộc vào khả năng của chương trình cơ sở và phần cứng.
Các giai đoạn vòng lặp điều khiển
- Thu nhận đầu vào
- Hợp nhất cảm biến
- Xử lý thuật toán điều khiển
- Tạo đầu ra động cơ
- Chỉnh sửa phản hồi
Hợp nhất cảm biến
Bộ điều khiển thu thập dữ liệu từ nhiều cảm biến:
- Con quay hồi chuyển
- Gia tốc kế
- Từ kế
- Phong vũ biểu
- Mô-đun GPS
Các đầu vào này được hợp nhất bằng cách sử dụng các thuật toán như:
- Bộ lọc Kalman
- Bộ lọc bổ sung
- Bộ lọc Mahony / Madgwick
Quá trình này tạo ra một ước tính chính xác về thái độ và vị trí của máy bay không người lái.
Điều khiển chuyến bay PID
Hầu hết các máy bay không người lái dựa vào vòng điều khiển PID :
[ Đầu ra = K_p \cdot e + K_i \int e,dt + K_d \frac{de}{dt} ]
Trong đó:
- (e) = sai số giữa hướng mong muốn và hướng đo được
- (K_p) = lợi nhuận tỷ lệ
- (K_i) = khuếch đại tích phân
- (K_d) = lợi ích đạo hàm
Các thông số này điều chỉnh mức độ tích cực của máy bay không người lái điều chỉnh chuyển động của nó.
3. Các thành phần cốt lõi của bộ điều khiển bay không người lái
Bảng mạch máy bay không người lái tích hợp nhiều mô-đun chức năng.
Vi điều khiển / Bộ xử lý
Bộ xử lý là lõi tính toán của máy bay không người lái.
Các gia đình MCU phổ biến bao gồm:
- Dòng STM32
- Bộ xử lý ARM Cortex-M
Trách nhiệm chính:
- Chạy chương trình cơ sở chuyến bay
- Thực thi các thuật toán điều khiển
- Xử lý hợp nhất cảm biến
- Quản lý các giao thức truyền thông
Đơn vị đo lường quán tính (IMU)
IMU thường tích hợp:
- Con quay hồi chuyển 3 trục
- Gia tốc kế 3 trục
Các cảm biến này đo vận tốc góc và gia tốc tuyến tính.
Giao diện điều khiển động cơ
Bộ điều khiển chuyến bay xuất tín hiệu đến ESC (Bộ điều khiển tốc độ điện tử) qua:
- PWM
- OneShot
- Giao thức kỹ thuật số DShot
Mạch điều chỉnh nguồn điện
Bộ điều chỉnh điện áp chuyển đổi điện áp pin thành đường ray ổn định:
- Đường sắt 5V
- Đường ray logic 3.3V
Giao diện ngoại vi
Các giao diện điển hình bao gồm:
- UART
- SPI
- I²C
- Xe buýt CAN (máy bay không người lái tiên tiến)
4. Các loại bảng mạch được sử dụng trong máy bay không người lái
Thiết bị điện tử máy bay không người lái thường được chia thành nhiều mô-đun PCB chuyên dụng.
Bảng điều khiển chuyến bay
Xử lý:
- xử lý cảm biến
- thuật toán điều khiển
- ổn định chuyến bay
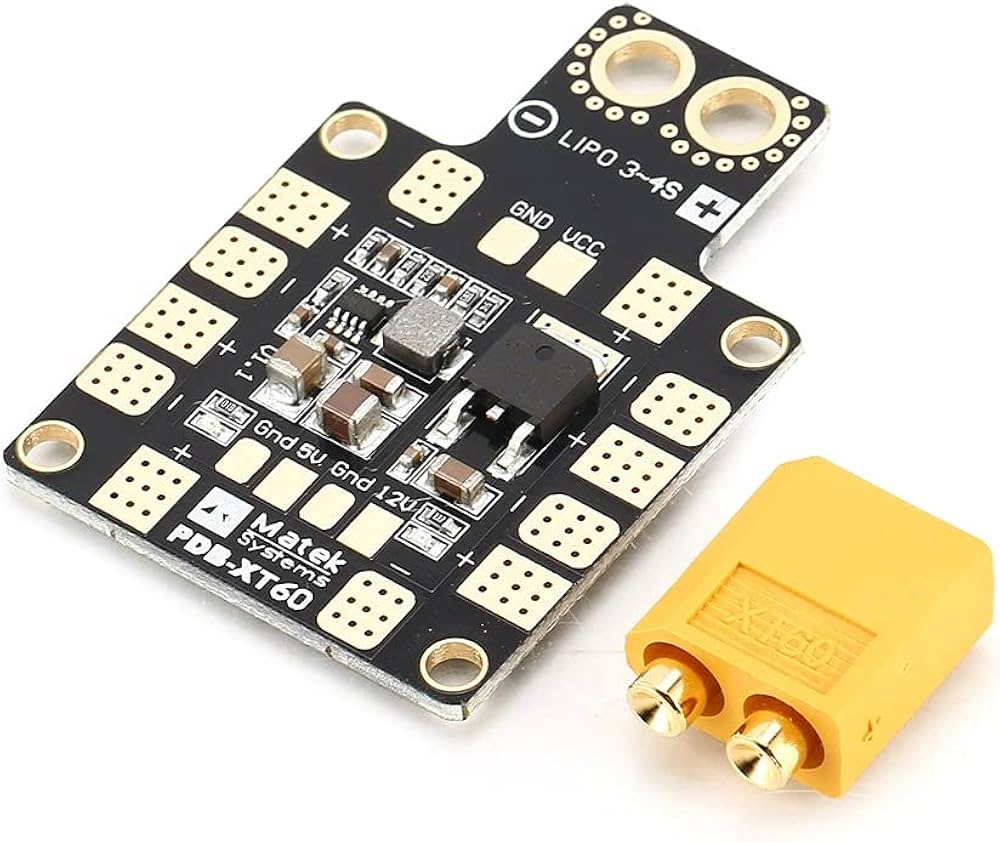
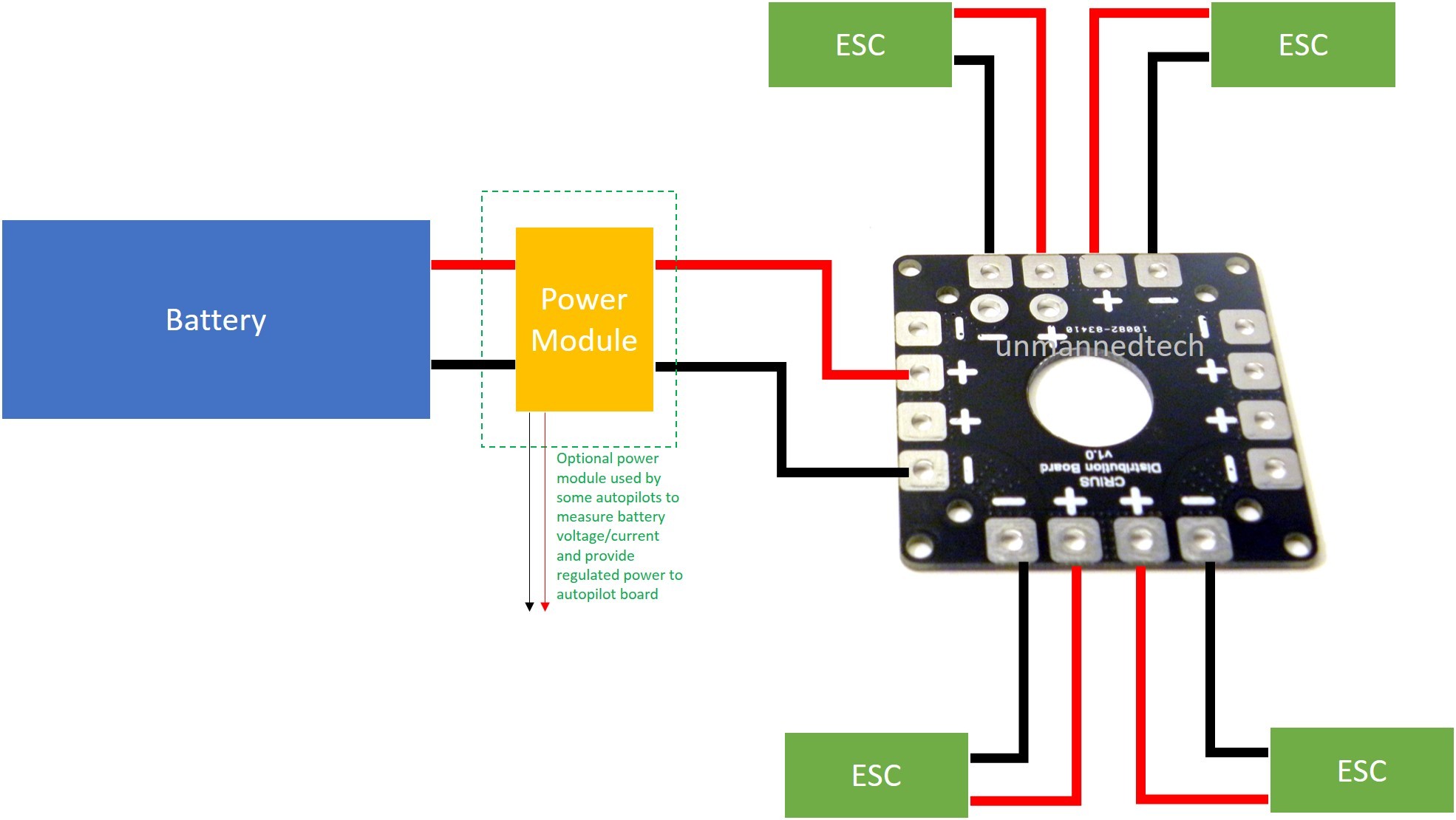
Bảng phân phối điện (PDB)
Phân phối năng lượng pin cho:
- ESC
- bộ điều khiển bay
- tải trọng điện tử
Bảng ESC
ESC chuyển đổi nguồn pin DC thành tín hiệu truyền động động cơ ba pha .
Bảng GPS
Cung cấp:
- theo dõi vị trí
- điều hướng
- Chức năng trở về nhà
Bảng video / máy ảnh
Xử lý:
- chụp ảnh
- Truyền FPV
- lớp phủ đo từ xa
5. Đường ống xử lý tín hiệu trong Drone Electronics
Xử lý tín hiệu bên trong bộ điều khiển bay của máy bay không người lái tuân theo một đường ống có cấu trúc.
1. Nhận tín hiệu
Đầu vào bao gồm:
- Tín hiệu điều khiển từ xa
- Dữ liệu IMU
- Dữ liệu GPS
- tín hiệu đo từ xa
2. Cảm biến kết hợp
Tín hiệu cảm biến thô bị nhiễu và phải được lọc.
Các kỹ thuật lọc phổ biến bao gồm:
- Bộ lọc thông thấp
- Bộ lọc Kalman
- Bộ lọc bổ sung
3. Thực thi thuật toán điều khiển
Điều khiển chương trình cơ sở tính toán điều chỉnh lực đẩy động cơ mong muốn .
4. Đầu ra động cơ
Các lệnh được truyền đến ESC thông qua tín hiệu kỹ thuật số hoặc PWM.
5. Phản hồi ổn định
Vòng lặp lặp lại liên tục để duy trì động lực bay ổn định.
6. Phân phối điện và quản lý điện
Kiến trúc năng lượng rất quan trọng đối với độ tin cậy của máy bay không người lái.
Nguồn pin
Hầu hết các máy bay không người lái sử dụng Pin LiPo từ:
- 2S (7.4V)
- 4S (14.8V)
- 6S (22.2V)
Chuyến baytage Quy định
Bộ chuyển đổi DC-DC tạo ra điện áp ổn định:
- 5V cho hệ thống logic
- 3.3V cho cảm biến
Phân phối hiện tại
Xe buýt điện cung cấp năng lượng cho:
- động cơ
- Bộ điều khiển
- tải trọng điện tử
Thiết kế PCB phù hợp phải xem xét:
- chiều rộng dấu vết đồng
- tản nhiệt
- công suất hiện tại
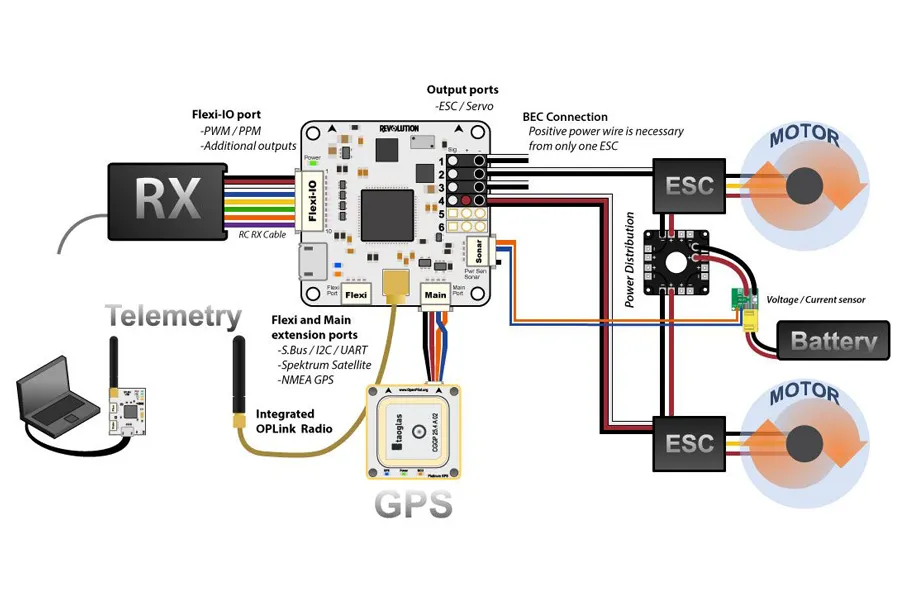
7. Hệ thống thông tin liên lạc trên bảng mạch máy bay không người lái
PCB máy bay không người lái hỗ trợ nhiều hệ thống con giao tiếp.
Liên kết điều khiển từ xa
Các giao thức vô tuyến điển hình bao gồm:
- SBUS
- CRSF
- DSMX
Chúng truyền lệnh phi công đến bộ điều khiển bay.
Giao tiếp GPS
Mô-đun GPS kết nối qua UART.
Dữ liệu bao gồm:
- vĩ độ
- kinh độ
- độ cao
- vận tốc
Đo từ xa
Phép đo từ xa gửi dữ liệu thời gian thực đến trạm mặt đất:
- Điện áp pin
- Chế độ máy bay
- độ cao
- cường độ tín hiệu
Truyền video
Máy bay không người lái FPV truyền video qua:
- analog 5,8 GHz
- Hệ thống HD kỹ thuật số
8. Các lỗi PCB của máy bay không người lái phổ biến và khắc phục sự cố
| đề | Nguyên nhân có thể | Giải pháp kỹ thuật |
|---|---|---|
| Máy bay không người lái không bật nguồn | Pin hoặc voltage lỗi bộ điều chỉnh | Kiểm tra pin voltage và đường ray nguồn |
| Các thành phần quá nhiệt | Đoản mạch hoặc dòng điện quá mức | Kiểm tra dấu vết PCB và làm mát |
| Chuyến bay không ổn định | Sai lệch cảm biến hoặc lỗi hiệu chuẩn | Hiệu chỉnh lại cảm biến IMU |
| Tín hiệu yếu | Sự cố ăng-ten hoặc máy thu | Kiểm tra hệ thống dây điện của ăng-ten và máy thu |
| Các thành phần bị cháy | ESC hoặc hư hỏng do tăng điện | Thay thế các thành phần bị hư hỏng |
| Lỗi động cơ | Đường tín hiệu ESC bị hỏng | Kiểm tra kết nối ESC |
9. Sửa chữa bảng mạch máy bay không người lái bị hỏng
Sửa chữa PCB của máy bay không người lái đòi hỏi phải chẩn đoán cẩn thận.
1. Kiểm tra trực quan
Kiểm tra:
- IC bị cháy
- tụ điện bị hỏng
- đầu nối bị hỏng
2. Làm sạch
Sử dụng:
- cồn isopropyl
- bàn chải chống tĩnh điện
3. Kiểm tra điện
Mạch kiểm tra với:
- Đồng hồ vạn năng
- máy hiện sóng
4. Thay thế linh kiện
Thay thế các bộ phận bị lỗi như:
- cơ quan quản lý
- tụ điện
- kết nối
5. Sửa chữa mối hàn
Các mối hàn nguội có thể gây ra các lỗi gián đoạn.
6. Kiểm tra chức năng
Xác minh cuối cùng phải bao gồm:
- Kiểm tra động cơ
- Hiệu chuẩn cảm biến
- bay thử nghiệm
10. Nâng cấp và sửa đổi bảng mạch máy bay không người lái
Người dùng nâng cao thường nâng cấp thiết bị điện tử của máy bay không người lái.
Các sửa đổi phổ biến bao gồm:
- cài đặt bộ vi điều khiển nhanh hơn
- Thêm cảm biến lưu lượng quang học
- tích hợp các mô-đun LiDAR
- nâng cấp giao thức ESC
- Thêm các mô-đun đo từ xa tầm xa
Các lợi ích bao gồm:
- Cải thiện độ ổn định bay
- phạm vi bay dài hơn
- khả năng điều hướng tốt hơn
Tuy nhiên, các sửa đổi đòi hỏi phải xem xét cẩn thận:
- Công suất tiêu thụ
- Khả năng tương thích chương trình cơ sở
- Giới hạn bố cục PCB
11. Xu hướng mới nổi trong điện tử máy bay không người lái và công nghệ PCB
Thiết bị điện tử của máy bay không người lái đang phát triển nhanh chóng.
Thiết kế PCB mật độ cao
Bảng UAV hiện đại sử dụng:
- PCB nhiều lớp
- Công nghệ HDI
- Các thành phần cao độ nhỏ
Bộ điều khiển máy bay hỗ trợ AI
Trí tuệ nhân tạo cho phép:
- tránh chướng ngại vật
- Điều hướng tự động
- theo dõi đối tượng
Giao tiếp 5G
5G cải thiện:
- Truyền phát video thời gian thực
- Điều khiển từ xa có độ trễ thấp
Vật liệu tiên tiến
Vật liệu PCB mới cải thiện:
- Quản lý nhiệt
- tính toàn vẹn của tín hiệu
Bao bì điện tử 3D
Thiết kế PCB xếp chồng lên nhau làm giảm kích thước và trọng lượng.
12. Câu hỏi thường gặp
Bộ điều khiển bay không người lái làm gì?
Bộ điều khiển bay xử lý dữ liệu cảm biến và lệnh phi công để điều khiển tốc độ động cơ, cho phép máy bay không người lái duy trì thăng bằng và điều hướng chính xác.
Tại sao cảm biến IMU lại quan trọng trong máy bay không người lái?
Cảm biến IMU đo chuyển động và hướng, cho phép bộ điều khiển ổn định máy bay trong quá trình bay.
Máy bay không người lái có thể hoạt động mà không cần GPS không?
Đúng. Nhiều máy bay không người lái có thể bay chỉ bằng cảm biến IMU, mặc dù GPS cải thiện điều hướng và cho phép các tính năng tự động.
Nguyên nhân nào gây ra lỗi PCB của máy bay không người lái thường xuyên nhất?
Các nguyên nhân phổ biến bao gồm:
- tăng điện
- hư hỏng do ẩm
- quá nóng
- Tác động cơ học
13. Kết luận
Bảng mạch máy bay không người lái đại diện cho cơ sở hạ tầng điều khiển và tình báo trung tâm của các hệ thống UAV hiện đại. Bằng cách tích hợp cảm biến, thuật toán điều khiển, quản lý năng lượng và giao diện truyền thông, bộ điều khiển chuyến bay cho phép chuyến bay ổn định và nhạy bén.
Khi các ứng dụng UAV mở rộng — từ chụp ảnh trên không đến kiểm tra công nghiệp và hậu cần tự động — các thiết bị điện tử cơ bản tiếp tục phát triển. Những tiến bộ trong Tích hợp AI, thiết kế PCB mật độ cao và công nghệ truyền thông tốc độ cao đang thúc đẩy thế hệ nền tảng máy bay không người lái tiếp theo, giúp chúng tự chủ, hiệu quả và có khả năng hơn bao giờ hết.