
Trình điều khiển động cơ bước A4988 so với DRV8825: Hướng dẫn lựa chọn đầy đủ (2026)
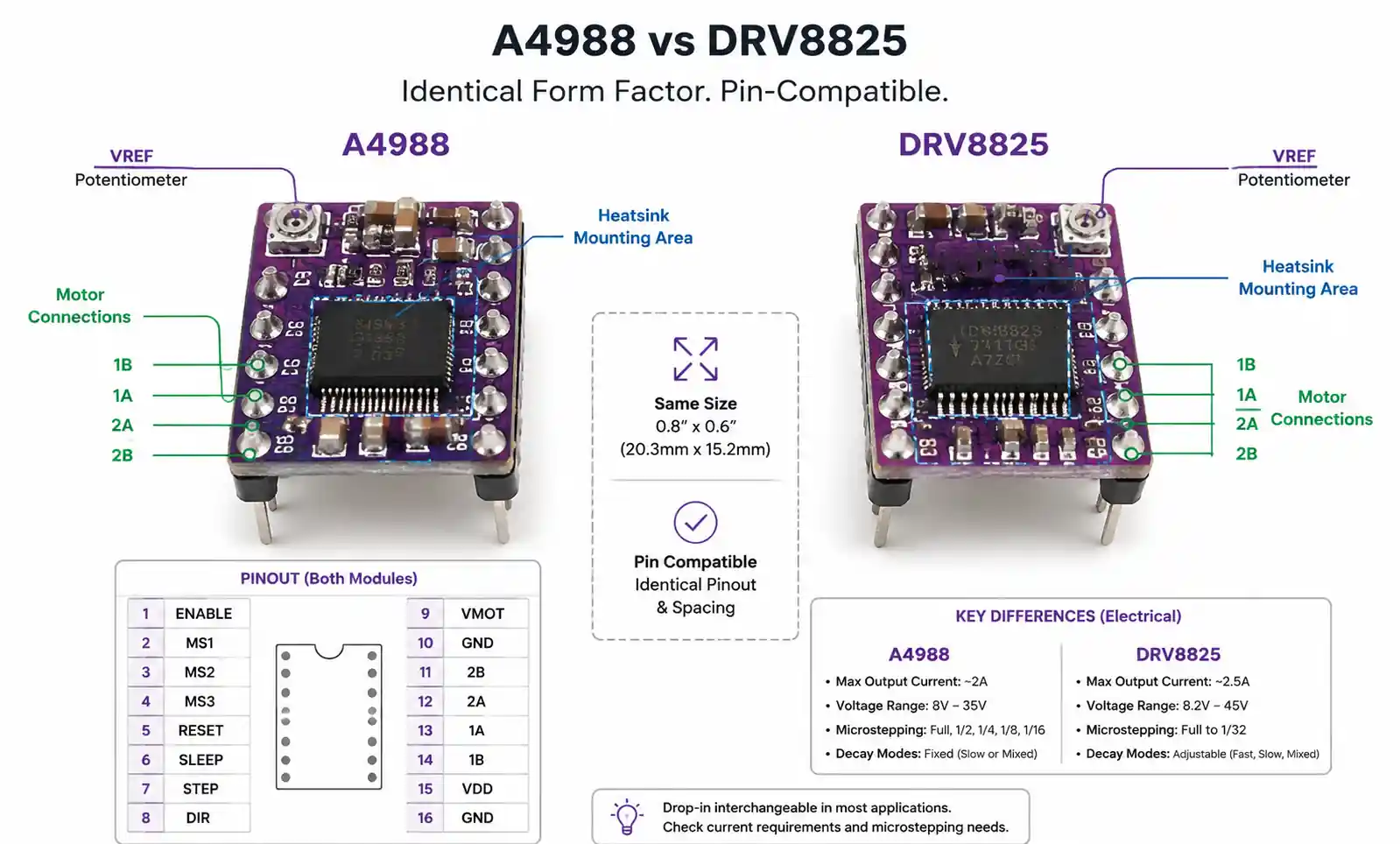
Việc lựa chọn giữa trình điều khiển động cơ bước A4988 và DRV8825 ảnh hưởng đến việc phân phối mô-men xoắn, quản lý nhiệt, chất lượng chuyển động và chi phí hệ thống. Cả hai đều có cùng dấu chân và sơ đồ chân, nhưng các đặc tính điện của chúng khác nhau đáng kể—hướng dẫn này giúp bạn kết hợp khả năng của trình điều khiển với các yêu cầu về động cơ và ứng dụng của mình.
Mục lục
- [So sánh các thông số kỹ thuật chính] (#specifications)
- Phân tích hiệu suất: Xử lý dòng điện và quản lý nhiệt
- Khả năng vi bước và chất lượng chuyển động
- [Hướng dẫn lựa chọn ứng dụng] (hướng dẫn #application)
- [Cân nhắc thiết kế và lỗi thường gặp] (#design-Cân nhắc)
- Câu hỏi thường gặp
- Kết luận
1. So sánh các thông số kỹ thuật chính
| Tham số | Đáp 4988 | DRV8825 | Tác động thực tế |
|---|---|---|---|
| Điện áp động cơ tối đa | 35V | 45V | DRV8825 hỗ trợ động cơ điện áp cao hơn để tăng mô-men xoắn |
| Dòng điện liên tục mỗi pha | 1A (không có tản nhiệt) | 1.5A (không có tản nhiệt) | DRV8825 điều khiển động cơ lớn hơn mà không cần làm mát bổ sung |
| Dòng điện cực đại trên mỗi pha | 2A | 2.2A | Cả hai đều xử lý dòng điện tăng đột biến ngắn trong quá trình tăng tốc |
| Bước vi mô tối đa | Bước 1/16 | Bước 1/32 | DRV8825 cung cấp độ phân giải tốt hơn cho chuyển động mượt mà hơn |
| Độ rộng xung bước tối thiểu | 1 μs | 1,9 μs | A4988 phản hồi nhanh hơn với tín hiệu bước tốc độ cao |
| Điện áp cung cấp logic | 3-5.5V | 2.5-5.25V | Cả hai đều tương thích với logic 3.3V và 5V |
| Khả năng chịu nhiệt (θJA) | 45 ° C / W | 28 ° C / W | DRV8825 tản nhiệt hiệu quả hơn |
| Tính năng bảo vệ | Nhiệt, quá dòng | Nhiệt, quá dòng, UVLO | DRV8825 thêm khóa điện áp thấp |
Xếp hạng dòng điện và điện áp cao hơn của DRV8825 phù hợp với động cơ NEMA 17 và NEMA 23 lớn hơn, trong khi A4988 vẫn tiết kiệm chi phí cho các động cơ nhỏ hơn. Sự khác biệt về điện trở nhiệt trở nên quan trọng trong các hệ thống kín — θJA thấp hơn của DRV8825 cho phép dòng điện cao hơn mà không cần tắt nhiệt.
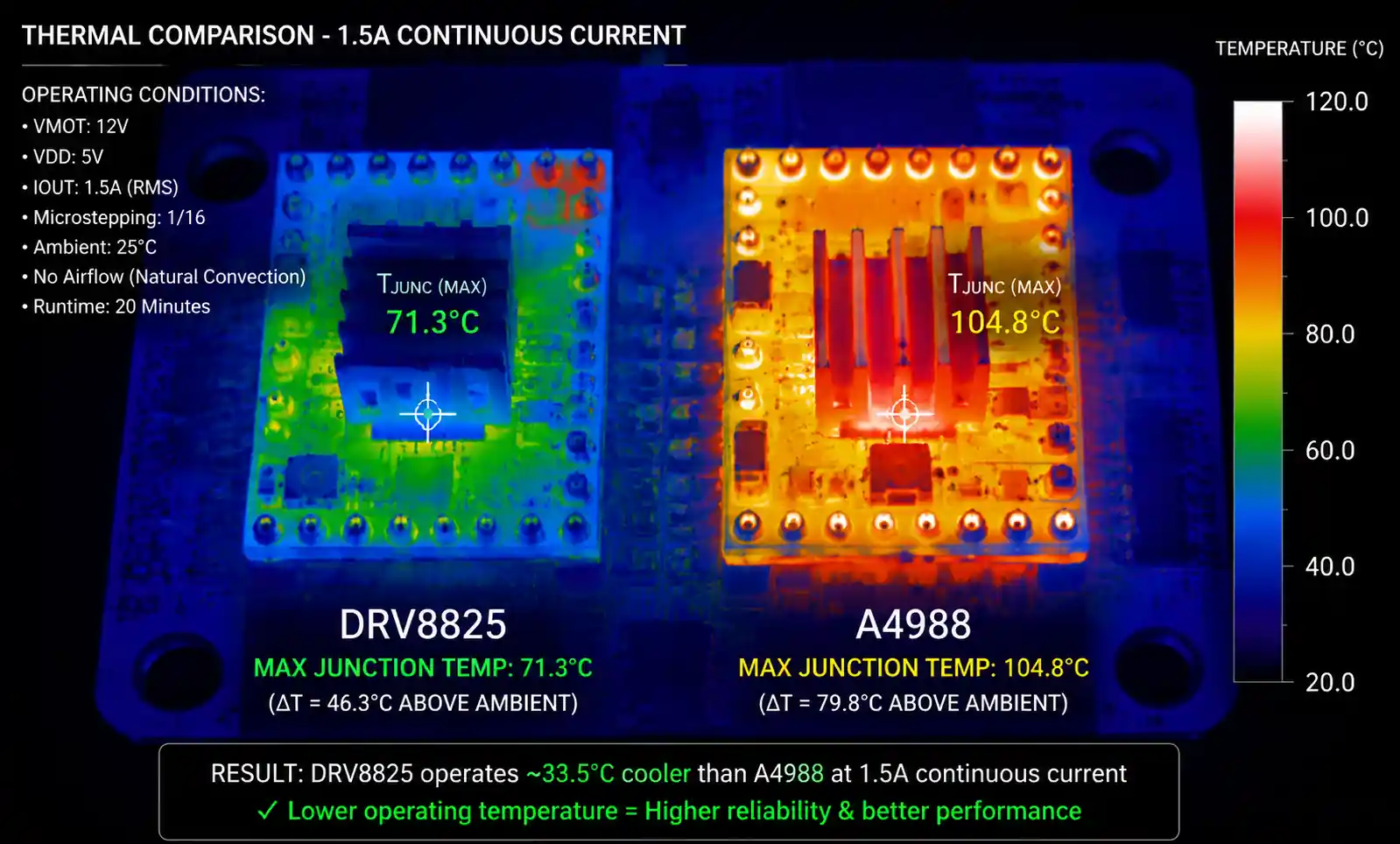
2. Hiệu suất: Xử lý dòng điện và quản lý nhiệt
Cả hai trình điều khiển đều sử dụng quy định dòng điện của máy cắt thông qua VREF: I_limit = VREF / (8 × R_sense). Với điện trở cảm biến 0,1Ω tiêu chuẩn, VREF từ 0,4V đến 2,0V bao gồm hầu hết các động cơ bước vừa và nhỏ.
Xếp hạng liên tục 4988A của A1A giới hạn việc lựa chọn động cơ đối với động cơ NEMA 14 nhỏ hơn hoặc động cơ NEMA 17 dòng điện thấp. Vượt quá mức này sẽ kích hoạt tắt nhiệt ở nhiệt độ tiếp giáp ~ 150 ° C. Xếp hạng 1.5A của DRV8825 mở rộng đến động cơ NEMA 17 tiêu chuẩn (1.2-1.5A mỗi pha), phổ biến trong máy in 3D và các ứng dụng CNC nhỏ.
So sánh hiệu suất nhiệt
| Điều kiện hoạt động | A4988 Tăng nhiệt độ | DRV8825 Tăng nhiệt độ | Yêu cầu về tản nhiệt |
|---|---|---|---|
| Môi trường xung quanh 0,5A, 24V, 25 ° C | ~20°C | ~12°C | Không có |
| Môi trường xung quanh 1.0A, 24V, 25 ° C | ~60°C | ~35°C | Đề xuất cho A4988 |
| Môi trường xung quanh 1.5A, 24V, 25 ° C | Rủi ro ngừng hoạt động | ~55°C | Đề xuất cho DRV8825 |
| Môi trường xung quanh 2.0A, 24V, 25 ° C | Không an toàn | ~85°C | Bắt buộc đối với DRV8825 |
Gắn tản nhiệt làm giảm nhiệt độ tiếp giáp 20-30 ° C, kéo dài dòng điện an toàn lên ~ 30%. Làm mát bằng không khí cưỡng bức, liên tục trên 1.2A trở nên cần thiết bất kể lựa chọn của người lái xe. RDS (bật) thấp hơn của DRV8825 (0,38Ω so với 0,5Ω) trực tiếp làm giảm tổn thất I²R, tạo ra ít nhiệt hơn trên mỗi ampe được phân phối.
3. Khả năng vi bước và chất lượng chuyển động
A4988 cung cấp năm cài đặt (đầy đủ đến 1/16), trong khi DRV8825 cung cấp sáu cài đặt (đến 1/32). Đối với động cơ 200 bước, A4988 đạt được 3200 bước/vòng quay so với 6400 cho DRV8825.
Ngoài 1/16 microstepping, cải thiện độ chính xác vị trí trở nên nhỏ do mô-men xoắn hãm động cơ và các hạn chế điều chỉnh hiện tại. Chế độ 1/32 của DRV8825 có giá trị nhất để giảm cộng hưởng tầm trung và tiếng ồn âm thanh hơn là độ phân giải 6400 vị trí thực sự.
Ở tốc độ thấp (<500 bước/giây), microstepping cao hơn giúp giảm độ rung—có thể nhìn thấy trong chất lượng in hoặc độ hoàn thiện bề mặt. Ở tốc độ cao (>5000 bước/giây), lợi ích của microstepping giảm đi và hiệu suất phụ thuộc nhiều hơn vào việc lựa chọn động cơ và điều chỉnh gia tốc.
Bước vi mô mịn hơn của DRV8825 làm giảm gợn mô-men xoắn từ 5-8% (A4988 ở 1/16) xuống 3-5%. Đối với các ứng dụng vận tốc không đổi như thanh trượt máy ảnh hoặc hệ thống pha chế, sự khác biệt này có thể đo lường được và ảnh hưởng đến chất lượng đầu ra.
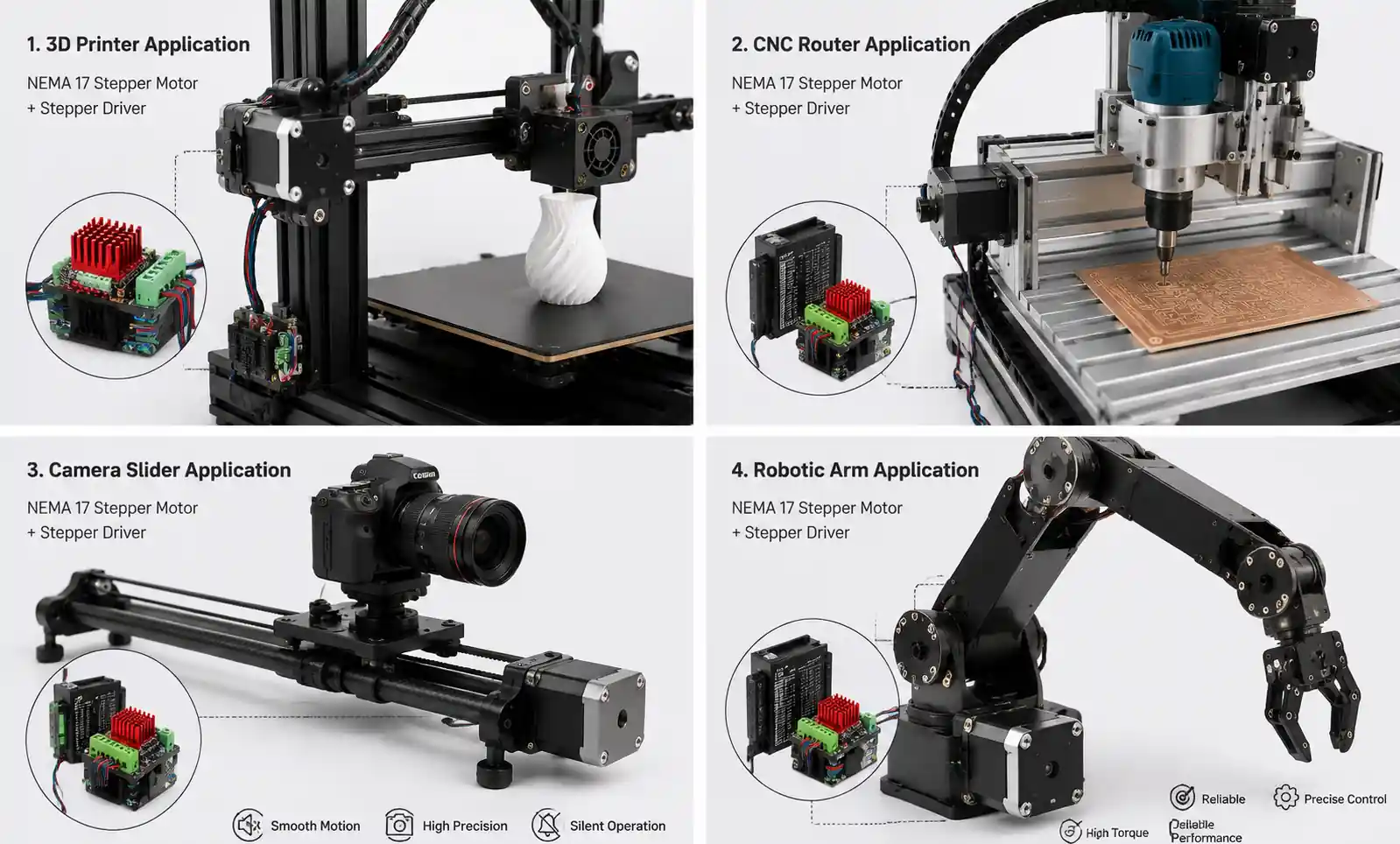
4. Hướng dẫn lựa chọn ứng dụng
| Ứng dụng | Kích thước động cơ | Tài xế được đề xuất | Lý do chính |
|---|---|---|---|
| Máy in 3D (Tiêu chuẩn) | NEMA 17, 1.2-1.5A | DRV8825 | Công suất hiện tại, chế độ 1/32 giảm hiện vật |
| Máy in 3D (Ngân sách) | NEMA 17, 0.8-1.0A | Đáp 4988 | Chi phí thấp hơn, đủ dòng điện |
| Bộ định tuyến CNC (Nhỏ) | NEMA 23, 1.5-2.0A | DRV8825 w / tản nhiệt | Dòng điện / điện áp cao hơn, hiệu suất nhiệt |
| Thanh trượt máy ảnh | NEMA 14/17 | DRV8825 | Chuyển động mượt mà hơn từ 1/32 bước nhỏ |
| Máy khắc laser | NEMA 17, 1.0-1.2A | Hoặc | Chọn dựa trên yêu cầu tốc độ |
| Khớp cánh tay robot | NEMA 17, 1.0-1.5A | DRV8825 | Độ phân giải cao hơn cho chuyển động góc mượt mà |
| Chọn và đặt | NEMA 17, 1.2A | Đáp 4988 | Phản hồi bước nhanh hơn để tăng tốc nhanh |
Chọn A4988 khi: Dòng điện động cơ ≤1A, ngân sách là chính, xung bước >150 kHz hoặc chuyển động khởi động-dừng nhanh chiếm ưu thế.
Chọn DRV8825 khi: Dòng điện động cơ >1A, điện áp cung cấp tiếp cận 30V, độ mượt mà của chuyển động là rất quan trọng, nhiệt độ môi trường vượt quá 35 ° C hoặc độ phân giải vi bước tối đa là cần thiết.
5. Cân nhắc thiết kế và những lỗi thường gặp
Nguồn điện: Bao gồm điện dung số lượng lớn — điện phân tối thiểu 100μF + gốm 0,1μF cho mỗi trình điều khiển. Điện dung không đủ gây ra voltage tăng đột biến có thể vượt quá giới hạn 4988V của A35. Đối với nhiều trình điều khiển, hãy tính toán mức hòa đỉnh: N_drivers × I_max × 1,4, với biên độ 20%.
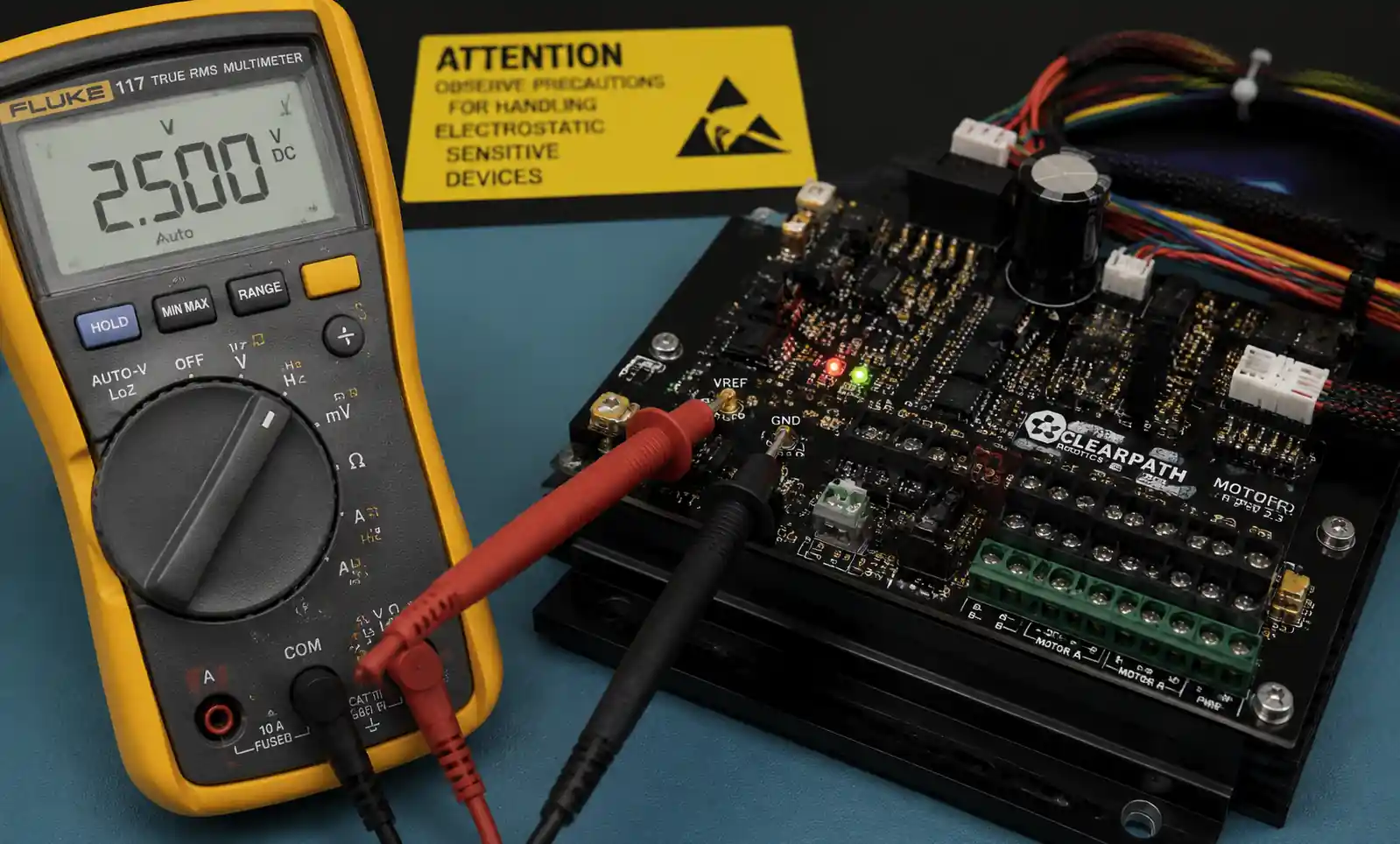
Cài đặt VREF: Đo với trình điều khiển được cấp nguồn nhưng không kết nối động cơ. Tính toán: VREF = I_desired × 8 × R_sense. Đối với R_sense = 0.1Ω và I_desired = 1A: VREF = 0.8V. Đối với dòng điện RMS (cắt hình sin), nhân với 0.7 để đặt RMS thành 70% định mức đỉnh.
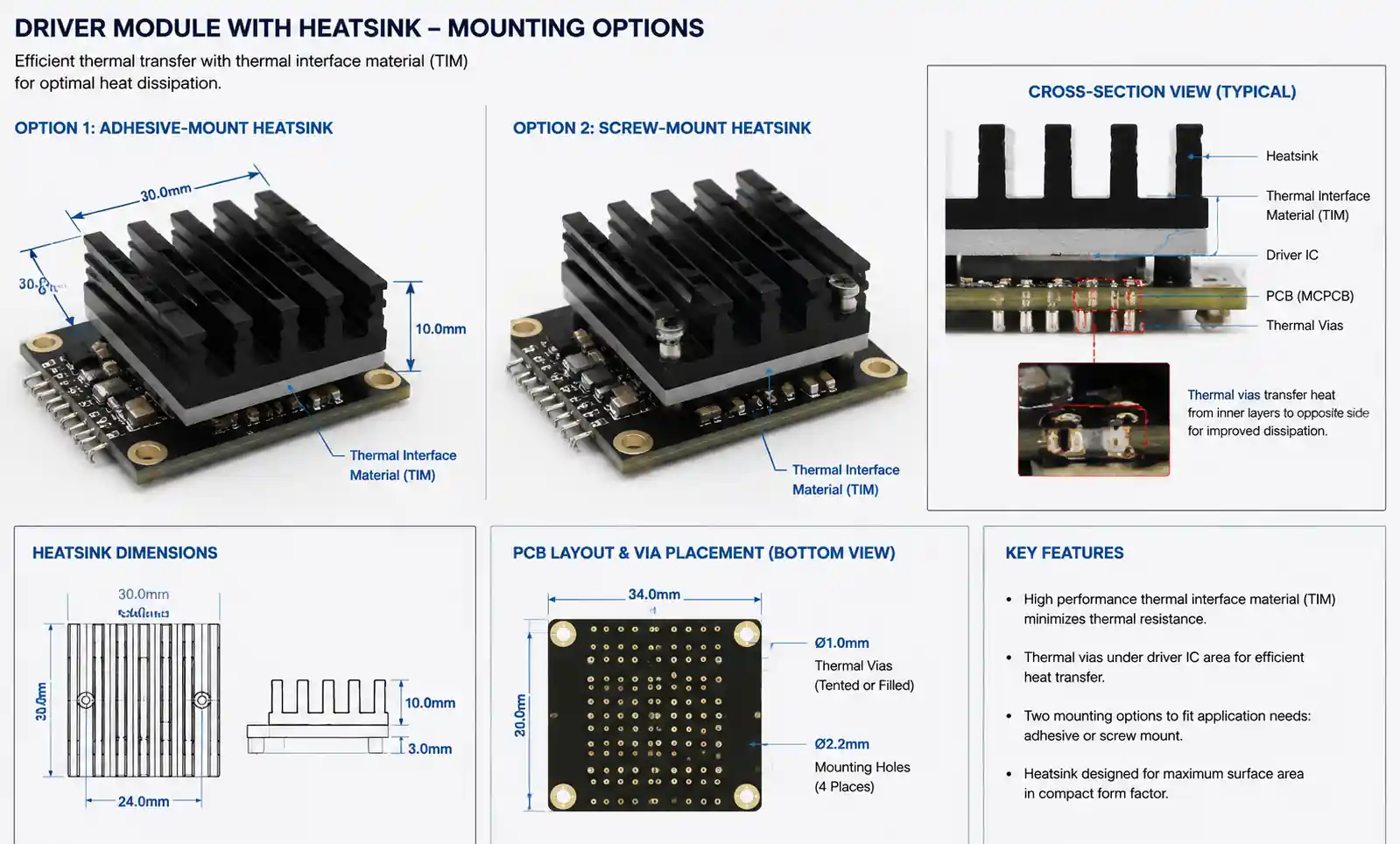
Bố cục PCB: Miếng tản nhiệt tiếp xúc phải được hàn vào mặt phẳng nối đất có nhiều lỗ tản nhiệt (đường kính tối thiểu 4, 0,3mm). Nếu không có vias thích hợp, nhiệt không thể thoát ra ngoài, làm giảm khả năng dòng điện từ 30-40%. Trên 1.2A, thêm một bộ tản nhiệt (10-15 ° C / W).
Những sai lầm phổ biến cần tránh
| Sai lầm | Hậu quả | Phòng ngừa |
|---|---|---|
| Kết nối / ngắt kết nối động cơ khi được cấp nguồn | Thiệt hại trình điều khiển | Luôn tắt nguồn trước |
| Không đủ tách rời | Điện áp tăng đột biến vượt quá xếp hạng | 100μF + 0,1μF cho mỗi trình điều khiển |
| Dòng điện đặt quá cao | Động cơ quá nóng | Đặt thành 70-80% định mức động cơ |
| Thiếu tản nhiệt ở dòng điện cao | Tắt nhiệt | Thêm tản nhiệt trên 1A liên tục |
| Không có biên điện áp trên VMOT | Điện áp võng trong quá trình chuyển động | Duy trì định mức động cơ trên 2V |
| Bật pin nổi | Hành vi không thể đoán trước | Kéo ENABLE cao hoặc thấp một cách rõ ràng |
6. Những câu hỏi thường gặp
Tôi có thể thay thế A4988 bằng DRV8825 mà không cần thay đổi mạch không?
Có, cùng sơ đồ chân và dấu chân. Điều chỉnh VREF và xác minh nguồn cung cấp của bạntage không vượt quá 35V. Cấu hình vi bước khác nhau — DRV8825 sử dụng chân MODE2 cho chế độ 1/32.
Điều gì gây ra rung cộng hưởng?
Động cơ bước có cộng hưởng tự nhiên (thường là 100-300 Hz) trong đó mô-men xoắn giảm và độ rung tăng lên. Microstepping cao hơn làm dịch chuyển hoạt động ra khỏi các điểm cộng hưởng. Chế độ 1/32 của DRV8825 cung cấp nhiều tùy chọn điều chỉnh hơn.
Làm cách nào để tính tốc độ tối đa?
Max_RPM ≈ (V_supply × 60) / (8 × L × I × steps_per_rev × microstep_factor). Đối với NEMA 17 (3mH, 1.2A) ở 24V với 1/16 microstepping: ≈156 RPM. Điện áp cao hơn (45V của DRV8825) tăng tốc độ tối đa.
Những thứ này có hoạt động với động cơ đơn cực không?
Cả hai đều chỉ được thiết kế cho động cơ lưỡng cực. Động cơ đơn cực có thể được sử dụng ở chế độ lưỡng cực bằng cách ngắt kết nối các vòi trung tâm, nhưng mô-men xoắn giảm ~ 30%.
Tại sao tài xế bị nóng khi đứng yên?
Trình điều khiển bước duy trì dòng điện giữ (bằng mức tối đa được cấu hình) để ngăn trục quay. Ở 1A, dự kiến tản liên tục 0.8-1.2W. Trong thời gian dài không hoạt động, hãy giảm dòng điện qua bộ điều khiển hoặc tắt bằng BẬT.
Sự khác biệt thực tế giữa 1/16 và 1/32 là gì?
Sự khác biệt về độ chính xác định vị là tối thiểu — cả hai đều vượt quá độ phân giải của hệ thống cơ học. 1/32 chủ yếu làm giảm tiếng ồn âm thanh và cung cấp chuyển động mượt mà hơn trong in 3D hoặc chuyển động của máy ảnh. Mô-men xoắn thấp hơn 5-10% ở 1/32. Chọn 1/32 cho chất lượng nhiễu và chuyển động, không phải độ chính xác định vị.
Tôi có thể trình điều khiển song song để có thêm dòng điện không?
Không. Cảm biến dòng điện độc lập gây nhiễu. Đối với động cơ >2A, sử dụng trình điều khiển dòng điện cao hơn (TB6600, DM542) hỗ trợ 4-8A mỗi pha.
7. Kết luận
Chọn A4988 khi: Động cơ định mức ≤1A, chu kỳ làm việc vừa phải, thiết kế nhạy cảm với chi phí hoặc tần số bước tiếp cận 200 kHz.
Chọn DRV8825 khi: Động cơ được đánh giá >1A, nhiệt độ môi trường cao hoặc chuyển động mượt mà nhất với yêu cầu tiếng ồn âm thanh tối thiểu. Xếp hạng 45V của nó cung cấp khoảng trống cho động cơ lớn hơn hoặc tăng điện áp để tăng mô-men xoắn tốc độ cao.
Trước khi hoàn thiện: xác minh dòng điện định mức của động cơ trên mỗi pha (chọn trình điều khiển cung cấp 120% với khả năng làm mát đầy đủ), điện áp cung cấp (nằm trong giới hạn) và các yêu cầu vi bước (phù hợp với độ chính xác định vị và thông số kỹ thuật tiếng ồn của bạn). Đối với nguyên mẫu, thử nghiệm cả hai trình điều khiển với hệ thống động cơ và cơ khí cụ thể của bạn cho thấy sự khác biệt về hiệu suất rõ ràng nhất.